














MAESTRO Micro - USB Servo controler 6 channels
USB Servo controller for servo motor
- Maestro Micro from Pololu
- 6 channels
- 1 KB memory
- Configuration Software, Autonomous script, USB-Serial script, TTL serial
- Arduino library & SDK

Payments are secured by LyraCollect, a French payment collection company.

It is possible to delivered to your home, to a pick-up point or picked up by appointment at MCHobby

We prepare, pack and ship your orders with great respect and care.
Take the control over small animatronic and robots with the 6 channel Maetro servo controler
This Micro Maestro controler have up to 6 channels and will make great job with servo motors and offering appealing features like native USB interface, scripting language. That small board is a high performance controler offering versatile control services (0.25μs resolution with internal speed control and acceleration control). IF you need a I/O controler to manipulate GPIOs then the Maestro will also do the job! (GPIOs to wire sensors or controling speed/ESC via USB).
As the Maestro is fully assembled, the board is ready to use out-of-the-box :-)
Note: ESC means Electronic Speed Controler, ESC is an hardware solution used to control motor speed.
The board is versatile and offer GPIO handling in a very compact formfactor (36.08mm × 27.94mm) and can be controled in 3 differents ways:
- Via USB connection directly from your computer,
- Via a TTL serial connection for embedded systems,
- Via internal script stored inside the board for autonomous control (so without any external controler like computer or microcontroler).
The channels can be configured as servo's output to act as a radio RC controler or to control motor speed (ESCs). Channels can also be configured as digital output or analog input. The high resolution pulse limit the servo's jitter at 200 ns, this make the Meastro really a great controler for high performance application like robot & animatronic control. This Maestro have built-in speed and acceleration control for each channel allowing to create smooth and seamless movement without the need of computer's computation to achieve the goal.
The Maestro can be daisy-chained with other Pololu's servo controler and motor controler.
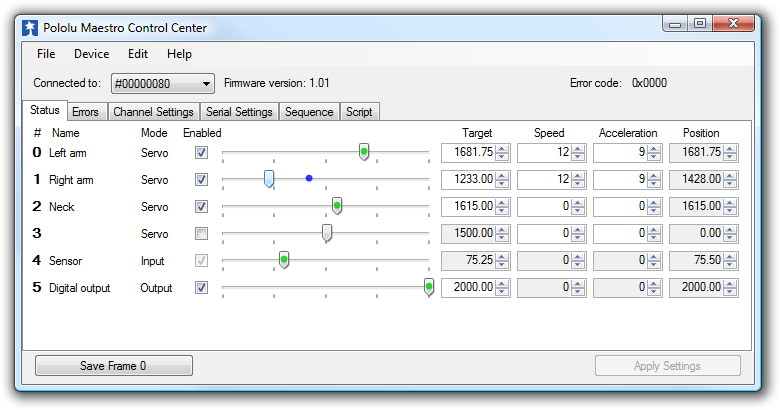
A free configuration and servo control software is available for Windows & Linux. This software allows you to configure and test the Maestro via USB connexion, to create movement sequences with servos (for anomatronic or walking robot). You can even use the software to write your own scripts, test the scripts and finally store them in the memory of the servo controler. Le micro Maestro have 1 Kio of internal memory to store the position and sequences for servos. Position and sequences can be "replay" witout a computer or microcontroler connected to the board.
If you need to store lot of servo position and/or sequence, you should have a look to the Maesto Mini serie (instead of Micro serie). Maestro Mini have 8 KB of memory storage (instead of 1KB).
As the Maestro channels can also be used as GPIO (general input output) or analog input, the channels can also read sensors values OR control externel peripheral from the computer (through USB and the Maestro). Those channels can be used with the scripting capability to create animatronic animation as response to an external event.
The Maestro product line goes far behind the control of servo-motor.
Content
The Micro Maestro is completely assembled and have male connector with 2.54mm spacing (as shown on the product image). The Maestro product line also includes Micro Maestro 12, 18 & 24 channels Maestro. A USB A to mini-B câble (not included) is required to connect the Maestro to a computer. The Maestro's Mini & Micro have mounting holes of 2.18mm (for M2 screws M2).
Fonctionnalités principales
- 3 methods to control the Maestro: USB, Serial TTL (5V) and external script
- Pulse output with 0.25μs resolution (~ 0.025° for most common servos, usually higher resolution than servos's controler resolution)
- Configurable pulse rate between 33 to 100 Hz
- Large pulse range from 64 to 3280 μs
- Independant speed & acceleration control on every channel.
- The channel can be configured to get a specific position at startup (or on error)
- Alternate functions of channels are:
- PWM to control servo.
- Digital input or output (GPIO).
- Analog input.
- Easy to use scripting language to create complex operation/animation with the Maestro controler (when not using the USB or serial connexion).
- A user guide (Pololu, english)
- A free software to configure and control the board from Windows or Linux:
- configure & test the controler
- Create, execute and save sequence of servo's movement for animatronic and robotic solution.
- Write, step-by-step evaluation and execution ("run") of the script stored into the Maestro controler.
- Two ways of controling the Maestro from a computer:
- The Virtual COM port (USB Serial) allows any programming langage to send command to the Maestro.
- The Pololu's Software Development Kit USB also you to write native C#, Visual Basic .NET, et Visual C++ app for the Maestro (the SDK also contains many sample)
- TTL serial feature:
- Bitrate support from 300 to 200000 bauds in fixe rate mode, autodetect-baud mode in the range 300 à 115200 bauds.
- Multi-protocol support: Pololu protocol (with advanced features) et Scott Edwards MiniSSC II (simplier protocol). No need to configure the module, the protocole is automatically detected.
- Several modules can be daisy-chained (Pololu servo and motor controler modules) by using only one single communication line.
- Can be used as serial-TTL to USB converter for a more complex project.
- Bitrate support from 300 to 200000 bauds in fixe rate mode, autodetect-baud mode in the range 300 à 115200 bauds.
- The Maestro Arduino library to quickly start with an Arduino microcontroler or A-Star.
- The board can be powered from USB connector or separate power supply (5 to 16 V).
The onboard regulator provides 5V output also available to the user. - Very small size: 3.10mm × 2.16cm and very light (4.8 g with connectors)
- The board firmware can be upgraded
Table de comparaison Maestro
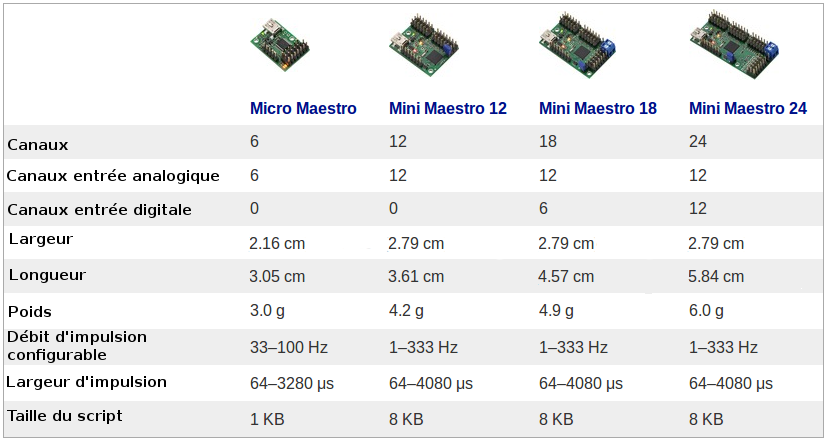
Notes:
- The configurable pulse rate and pulse width are tied togheter and are depending on external constraint serial baudrate and number of channels in use. See the Maestro user guide (Pololu, PDF) for more details.
- The script system is more powerfull of Maestro Mini than Maestro Micro.
Example of usage
- A servo controler (serial) for a multi-servo project (eg. robotic arm, animatronic) based on a BASIC Stamp or Arduino.
- Computer's servo controler drive via USB connexion.
- Motor controler with ESC (electronic speed control) controled from a computer via USB
- A display animatronic (Hallowin or Christmas) using sensor to react to event. Create an hexapode robot with 3 micro-servos and 2 distance sensor.
- Autonomous servo controler.
- See this sample video (Pololu sur YouTube)






