









Carte de contrôle Romi Robot (32U4)
Carte de contrôle pour robot Romi - Arduino et Pi compatible
- Processeur: 32U4 @ 16 Mhz (RAM 2 Kb, FLASH 32 Kb)
- Pilote moteur: DRV8838 (2.5 à 10.8V, 1.8A par canal)
- Accéléromètre,
- Gyroscope
- Logique: 5V
- Bootloader Arduino

Les paiements sont sécurisés par LyraCollect, une société de collecte de paiements française

Il est possible de se faire livrer chez soi, en point relais ou retirer sur rendez-vous chez MCHobby

Nous préparons, emballons et expédions vos commandes avec un grand respect et un grand soin.
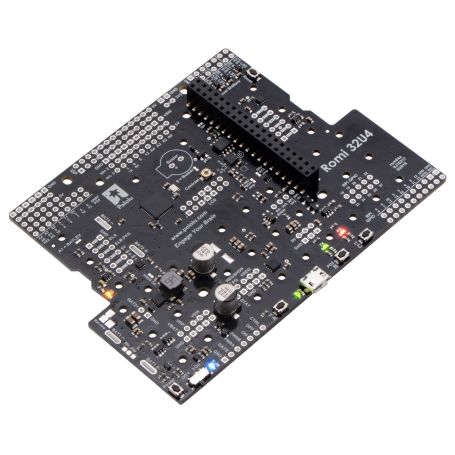
Transformer un châssis Romi en un robot programmable avec la carte contrôleur Romi 32U4 (arduino-compatible)
La carte contrôleur Romi 32U4 dispose de toutes les fonctionnalités nécessaires pour contrôler une base ROMI et en faire un robot.
La carte contrôler inclus:
- un microcontrôleur 32U4 (compatible Arduino IDE)
- un double contrôleur moteur
- un circuit d'alimentation multi-fonctionnel
- des senseurs intertiels (accéléromètre et gyroscope),
- des connexion pour encodeur à quadrature (disponible séparemment)
- connexions pour un écran LCD optionnel.
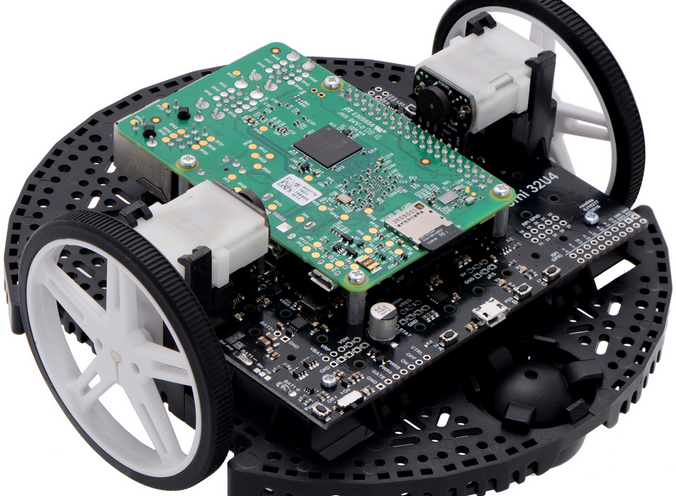
La carte a également la possibilité de s'interfacer avec un Raspberry-Pi, transformant ainsi la plateforme en fondation pour réaliser un robot Romi contrôlé par Raspberry-Pi.
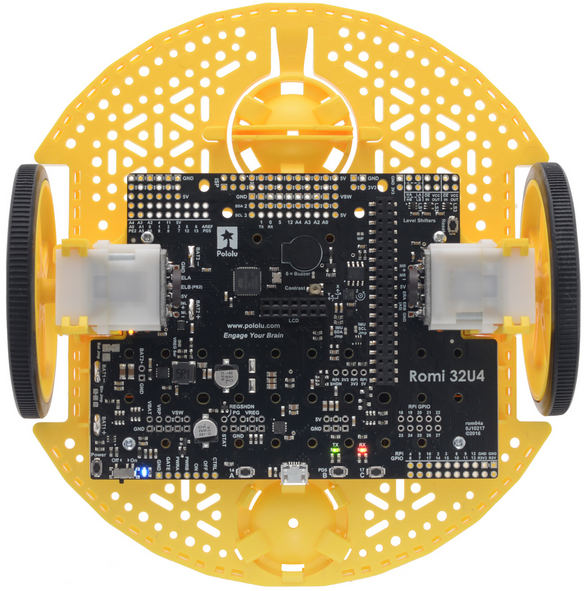
La carte contrôleur 32U4 du Romi est concule pour le châssis Romi afin de créer plus facilement une solution robotique personnalisable.
Comme pour les microcontrôleur 32U4 A-Star de Pololu, la carte contrôleur Romi 32U4 est propulsée par un microcontrôleur ATmega32U4 AVR (Microchip, précédemment Atmel) disposant d'un support USB natif. Le 32U4 est préchargé avec un bootloader Arduino-compatible. Le contrôleur dispose également de deux pont-H permettant de contrôler les moteurs et est conçu pour connecteur une paire d'encodeur Romi (kit disponible séparément). Cette combinaison permet de réaliser un contrôle moteur en boucle fermée. La carte inclus également un puissant convertisseur DC/DC 5V (régulateur step-down) capable de délivrer 2A en continu qui est associé à un circuit de distribution d'alimentation. Un accéléromètre 3-axes et un gyroscope offre un système de mesure inertiel au robot Romi 32U4 permettant d'estimer son orientation, détecter les forces externes (les chocs, et l'orientation de la gravité).
L'interface utilisateur est composée de 3 boutons poussoirs, LEDs indicatrices, un buzzer et un connecteur (pour un écran LCD optionnel).
Les LEDs, le buzzer et le LCD peuvent être utilisés pour offrir un retour d'information à l'utilisateur.
La carte contrôleur Romi 32U4 peut être utilisée soit comme:
- Une solution Arduino compatible autonome
- Un contrôleur de base pour créer une puissante solution à base de Raspberry Pi.
Le connecteur 2x20 broches disponible sur la carte (et trou de montage) permettent d'utiliser un Raspberry Pi directement avec la carte (Modèle B+ ou plus récent, incluant Raspberry Pi 3 B+ et modèle A+, ou un compatible Raspberry-Pi). Le Pi se branche directement sur la carte contrôleur. Les level shifters présent sur la carte adapent les niveau logiques entre le Pi et le 32U4. De la sortie, il est possible de mettre facilement en place une communication I²C et d'interfacer d'autres signaux entre les deux contrôleurs (la carte ROMI 32U4 et le Raspberry-Pi). La carte contrôleur ROMI 32U4 fournira l'alimentation 5 V au Raspberry-Pi.
Dans la configuration contrôleur ROMI 32U4 + Raspberry Pi, le Raspberry-Pi gère la PiCam + le contrôle haut-niveau du robot et envoi les commandes au contrôleur Romi 32U4 qui aura en charge la la gestion des tâches de bas niveau (faire fonctionner les moteurs, lire les encodeurs, interfacer des senseurs complémentaire et périphériques analogiques).
Afin de faciliter les connexions des senseurs et périphériques, les signaux de l' ATmega32U4 et du Raspberry Pi sont disponibles en breakout le long de la bordure de la carte à l'avant et à l'arrière (empattement 2.54mm). Les rails d'alimentation de la carte sont également disponible sur ces connecteurs.
Contenu
Pour chaque commande, vous recevrez une carte de contrôle 32U4 avec tous les composants SMD soudés sur la carte (ainsi que les composants through-hole) et testée. Contient également les différents éléments d'assemblage comme présenté sur l'image ci-dessous.
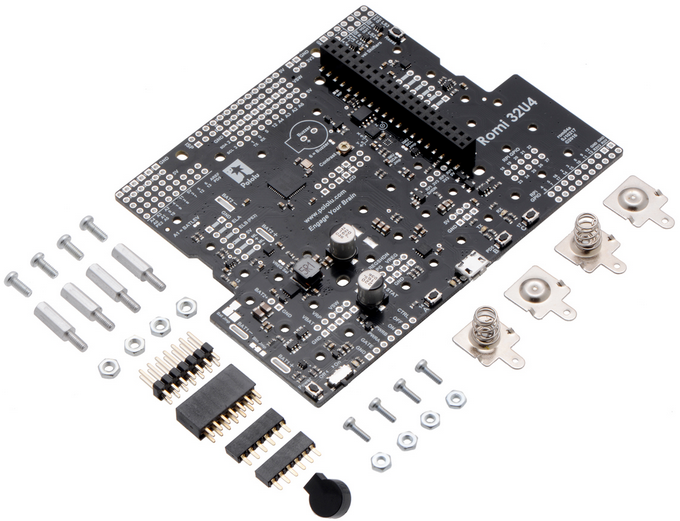
A noter que quelques opérations de soudure seront nécessaires; voyez le guide utilisateur Romi pour les instructions d'assemblage.
Le châssis Romi chassis et autres éléments nécessaire à la constitution d'un robot Romi 32U4 complet ne sont pas inclus; voyez ci-dessous quelques suggestions d'éléments complémentaires .
Ce dont vous aurez besoin
Pour réaliser un robot avec le contrôleur Romi 32U4, vous aurez besoin de quelques éléments supplémentaires:
- un kit châssis Romi (qui inclus moteurs, roues, bille et contact de piles)
- une paire d'encodeur Romi
- six piles AA; Le châssis Romi et la carte contrôleur fonctionne aussi bien avec des piles alcalines que des accus rechargeable NiMH. Nous recommandons néanmoins l'usage d'accu rechargeable (qui produit moins de déchet)
- un câble USB A vers micro B pour connecter le robot sur votre ordinateur (pour programmer la carte et déboguer votre code)
- des outils pour faciliter l'assemblage; voir le guide utilisateur pour une liste détaillée des outils nécessaires
Accessoires optionnels
- un kit bras robotique Romi
- un compatible Raspberry Pi (pas absolument nécessaire, Pi modèle B+ ou plus récent, y compris Pi 3 B+ et Pi 3 modèle A+)
- senseurs
- connecteurs (headers, fils de prototypage, etc) pour ajouter des senseurs et autres périphériques
Autres cartes Romi, robots, et contrôleur robotique
En plus de la carte contrôleur Romi 32U4, il est possible d'utiliser d'autres cartes (plus simples) conçue pour le châssis Romi:
- la carte "contrôleur moteur et alimentation pour châssis Romi" diposant du même contrôleur moteur mais sans microcontrôleur. Cette carte propose également le même circuit d'alimentation (avec régulateur 5 V) que sur la carte contrôleur Romi 32U4. Avec cette carte, vous devrez choisir votre microcontrôleur et réaliser les connexions nécessaires au fonctionnement de la plateforme.
- La carte "distribution d'alimentation pour le châssis Romi". Celle-ci n'inclus que la protection contre la polarisation inversée, et le bouton d'alimentation (et circuit d'alimentation); Cette carte est utile et pratique lorsque vous n'avez besoin que d'une source d'alimentation pour le restant de votre projet.
Tutoriel
Un greffons logiciel pour l'environnement Arduino est disponible pour faciliter la programmation du robot Romi 32U4 et Pololu propose des bibliothèques Arduino (et exemples) pour vous aider à démarrer rapidement avec la plateforme.
- Guide utilisateur de la carte contrôleur Romi 32U4 (Wiki, Français)
Manuel d'utilisation de Pololu Romi 32U4. - Guide utilisateur de la carte contrôleur Romi 32U4 (Pololu, anglais, PDF)
- Schémas de la carte contrôleur 32U4 (Pololu, anglais, pdf)
- Diagrammes de brochage et distribution d'alimentation du contrôleur ROMI 32U4 (Pololu, anglais, pdf)
- Dimensions du contrôleur ROMI 32U4 (Pololu, anglais, pdf)
- Ressources et logiciels pour ROMI (pololu, anglais, pdf)
- Compatibilité Raspberry
- Zero / Zero W, Pi 3B+, Pi 4, Pi 5, Zero 2 W
- MCU : Famille
- AVR 8 bits



")