









Paire d'encodeur rotatif pour Romi - CPR 12
2x Encodeur rotatif pour robot Romi
- Encodeur à quadrature magnétique
- CPR 12 : comptage = 12 par rotation axe moteur
- Tension 3.5 à 18V

Les paiements sont sécurisés par LyraCollect, une société de collecte de paiements française

Il est possible de se faire livrer chez soi, en point relais ou retirer sur rendez-vous chez MCHobby

Nous préparons, emballons et expédions vos commandes avec un grand respect et un grand soin.
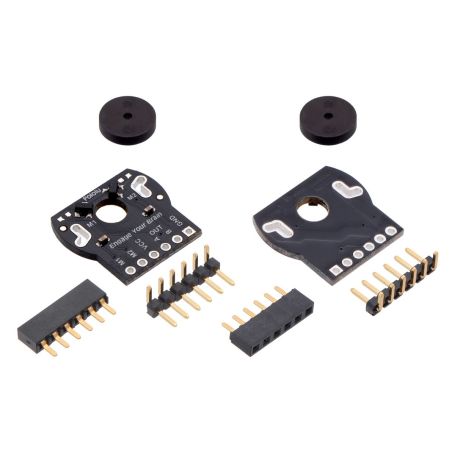
Ajoutez un encodeur à quadrature sur les moteurs de votre robot Romi
Ce kit encodeurs à quadrature inclus deux senseurs à double canal équipé de senseur à Hall effect et d'un disque magnétique 6 pôles (appelé disque CPR) utilisé pour ajouter un procédé de lecture à quadrature pour connaître la position de l'axe moteur des moteurs à engrenage du châssis Romi.
La carte encodeur détecte la rotation du disque magnétique en offrant une résolution de comptage de 12 impulsions par révolution complète de l'axe moteur. Notez que l'électronique doit compter les deux flans (montant et descendant) sur les deux cannaux pour obtenir une résolution complète correspondant à un comptage approximatif de 1440 par révolution de roue du robot Romi.
Ce kit propose une solution d'encodage vraiment compacte prenant place dans une carte de 11.5 mm × 22.5 mm à l'arrière du moteur sur trois des 4 côtés. Le dernier côté de la carte encodeur propose des connexions pour les signaux et l'alimentation (carte qui dépasse de 7mm par rapport aux rebords du moteur).
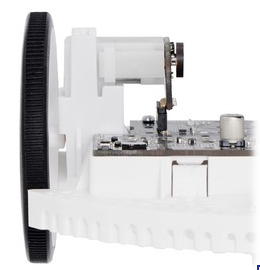
Tel que conçue, la carte encodeur a exactement la bonne hauteur pour être connectée sur une carte mère posée sur le châssis du Romi (voir les images ci-dessous). L'assemblage final (moteur + encodeur + disque CPR) ne dépasse pas l'axe à l'arrière du moteur (donc de 5mm à l'arrière du moteur).
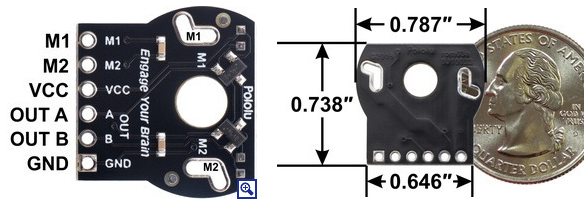
Brochage et installation
La carte encodeur est conçue pour être soudée directement à l'arrière du moteur, avec l'axe moteur passant par le trou prévu au milieu de la carte. Une façon de réaliser un bon alignement entre la carte et le moteur est de maintenir la carte bien en place a l'arrière du moteur pendant que l'on soude les bornes moteurs PUIS souder les autres broches (M1, M2, VCC, OUTA OUTB, GND) sur l'encodeur seulement lorsque celui-ci est en place sur la carte contrôleur et que moteur est en bien en place sur le châssis. Une fois le tout bien aligné, c'est le moment de souder les autres broches du connecteurs sur M1, M2, VCC, OUTA, OUTB, GND.
Pour l'instant, il existe deux cartes qui supportent nativement cet encodeur: la carte controleur Romi 32U4 et la carte "contrôleur moteur et distribution d'alimentation" pour le châssis Romi. Les broches de l'encodeur doivent être installés en pointant vers le bas de sorte à pouvoir être connecté sur la carte.
Pour les robots utilisant une carte personnalisée (ou n'utilisant aucune carte mais branché directement sur votre microcontrôleur favoris), il sera plus confortable d'installer le moteur avec la carte et les broches dirigés vers le haut de façon à faciliter les les raccordements à l'aide de connecteurs dupond (à 6 broches).

Note: il est possible de retirer le moteur du châssis ROMI et le retourner (de 180°) pour le refixer avec les broches vers le bas (vers le châssis). De cette façon, vous pouvez avoir vos connecteurs pointant vers le haut où vers le bas (comme vous le désirez).
Une fois la carte soudée sur le moteur, il est possible d'alimenter le moteur depuis les broches M1 et M2 accessibles sur la carte; les autres broches VCC et GND sont utilisés pour l'alimentation des senseurs tandis que les sorties AOUT A & OUT B permettent d'accéder aux signaux de l'encodeur à quadrature:
Les senseurs sont alimentés par l'intermédiaire des broches VCC et GND. VCC peut varier entre 3.5 V et 18 V, et les sorties A et B sont des sorties digitales à drain-ouvert et il est donc nécessaire d'avoir des résistances pull up vers la tension logique souhaitée (celle adaptée à votre microcontrôleur). La carte encodeur dispose de pastille pour placer des résistances pull-up SMD optionnelles (modèle 0603) sur les sorties pour ramener le potentiel a VCC. Cependant, la plupart des microcontrôleur disposent de résistances pull-up internes pouvant être activée à l'aide d'une simple ligne de code.
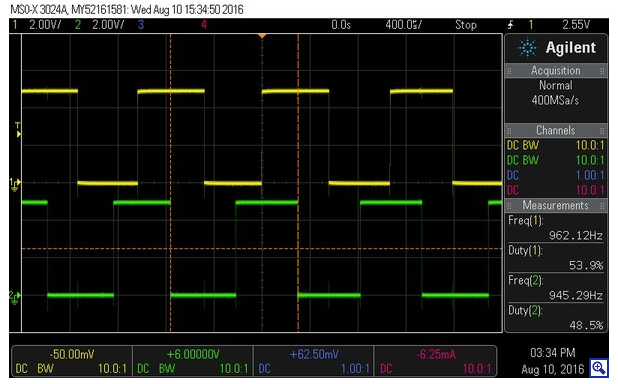
Sortie A et B de l'encodeur à quadrature
