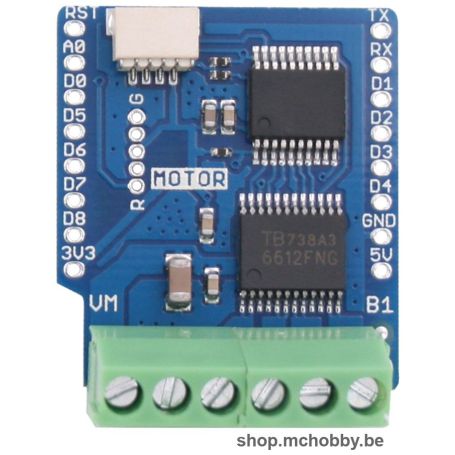



I2C Motor Shield for LOLIN Wemos D1, dual motor driver
- Dual motor controler
- Output current: 1.2A (3.2A peak)
- Motor voltage: 4.5 to 13.5V
- I2C interface
- Based on TB6612 dual H-Bridge

Payments are secured by LyraCollect, a French payment collection company.

It is possible to delivered to your home, to a pick-up point or picked up by appointment at MCHobby

We prepare, pack and ship your orders with great respect and care.
Propel your robot with this dual motor controler shield for Wemos
This shield used the powerfull TB6612 dual H-bridge motor controler and a custom I2C firmware burned into a STM32F030F4. The firmware is acting like a slave and receive the data via the I2C bus. The I2C instructions are used to drive the TB6612 double Power H-Bridge.
The firmware is able to handle the motor CW and CCW (clockwise and counter clockwise), short brake (all coils bind to the ground) and stop. The firmware also include a standby mode to spare energy. The standby mode can be activated via I2C or via external signal (see the configuration jumper under the board).
The board can handle two motors, motor A wired to A1-A2 outputs and motor B wired to B1 B2 output. The motor are powered with external power (the VM pin and shared ground) already helped by a large capacity soldered on the board itself.
The better for the end, since the board use I2C bus (pins D1 & D2) + Reset signal you spare lot of I/O lines on the Wemos. Even better, the shield expose 2 address pins named AD1 and AD0. This make a total of 4 distinct addresses (the default is 0x30). This means that you can drive up to 8 motors (you may find many of them on our shop).
Content
The motor shield and a section of male pinHeader to plug it on the Wemos. An additional section of PinHeader is included to help in wiring the motor. Motor not included!
Ressources
- Wemos D1 Mini Motor Shield Wiki page (english)
Contains technical information, code, sample, etc.


