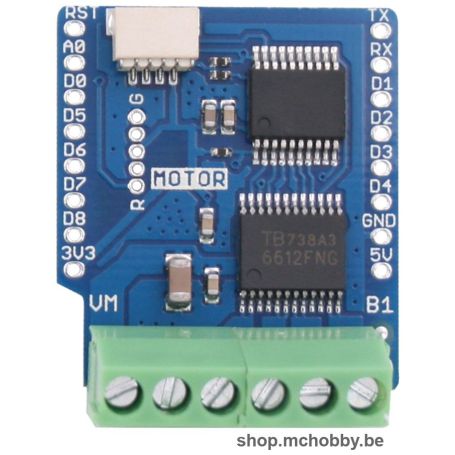



Shield moteur (I2C) pour LOLIN Wemos D1 - Contrôle de 2 moteurs
- Contrôleur 2 moteurs continu
- Courant de sortie: 1.2A (pointe de 3.2A)
- Tension moteur: 4.5 à 13.5V
- Interface I2C
- Basé sur TB6612 double pont-H

Les paiements sont sécurisés par LyraCollect, une société de collecte de paiements française

Il est possible de se faire livrer chez soi, en point relais ou retirer sur rendez-vous chez MCHobby

Nous préparons, emballons et expédions vos commandes avec un grand respect et un grand soin.
Propulsez votre robot avec ce shield de contrôle moteur pour Wemos
Ce shield utilise le puissant contrôleur TB6612 incluant un double pont-H et un firmware personnalisé géré par un microcontrôleur STM32F030F4. Le firmware agit comme un esclave sur le bus I2C et reçoit les données et instructions via le bus I2C. Ces instructions sont traduites par le microcontrôleur pour piloter le double pont-H TB6612.
Le firmware gère la rotation des moteurs dans le sens CW et CCW (ClockWise=Sens horlogique et Counter ClockWise=Sens anti-horlogique), short brake (freinage en raccordant les bobines à la masse) et l'arrêt. Le firmware inclus un mode "standby" pour économiser l'énergie. le mode "standby" peut être activé via I2C ou un signal externe (voyez les cavaliers de configuration sous la carte).
Le shield peut gérer deux moteurs, moteur A branché sur les sorties A1-A2 et moteur B branché sur les bornes B1-B2. Les moteurs sont alimenté par une source d'énergie externe (la broche VM et la masse commune) épaulé par une capacité soudée à même la carte.
Le meilleur pour la fin, étant donné que la carte utilise le bus I2C (broches D1 et D2) + signal Reset, cela permet d'économiser de nombreuses entrées/sorties sur le Wemos. Encore mieux, le microcontrôleur STM32F030F4 expose deux cavaliers d'adresses AD1 et AD0. Cela permet de disposer de 4 adresses distinctes (par défaut 0x30) et donc d'utiliser jusqu'à 4 shields moteurs sur le Wemos pour un total de 8 moteurs (vous trouverez également de nombreux moteurs sur le shop).
Contenu
Le shield moteur et une section de connecteur mâle pour brancher le shield moteur sur le Wemos. Un autre section de connecteur est incluse pour faciliter les branchements des moteurs. Note: les moteurs ne sont pas inclus!
Ressources
- Wemos D1 Mini Motor Shield Wiki page (english)
Contient des informations techniques, code, exemples, etc.


