






Zumo Kit Chassis - sans moteur
Chassis Zumo, en ABS, pour réaliser des robots à chenille, compétition de mini Sumo, suiveur de ligne

Les paiements sont sécurisés par LyraCollect, une société de collecte de paiements française

Il est possible de se faire livrer chez soi, en point relais ou retirer sur rendez-vous chez MCHobby

Nous préparons, emballons et expédions vos commandes avec un grand respect et un grand soin.
Un châssis à chenille de qualité pour propulser votre projet robotique
Le châssis Zumo de Pololu est une petite plateforme robotique qui fait moins de 10 cm de côté, lui permettant ainsi de se qualifier pour les compétitions Mini Sumo. Le corps principal est composé d'ABS noir et contient un compartiment pour 4 piles AA et deux emplacements pour des micro moteurs à engrenages métalliques (non inclus). Il est livré avec deux chenilles en silicones, deux roues motrices (à adapter sur les moteurs) et deux roues libres avec axes pour une fixation sur la plateforme. Le kit contient également une plaque de montage robotique (dont la fonction principale est de maintenir les moteurs en place et pouvoir monter votre électronique, microcontrôleur, pilotes moteurs, senseurs, etc).
Le kit inclus également la visserie d'assemblage (Moteurs et piles non incluses)
Ce kit contient les éléments nécessaires pour réaliser une petite plateforme robotique à haute performance sans se prendre la tête.
Choisir la mototrisation adaptée à vos besoins
Le chassis Zumo utilise deux moteurs, un pour chaque chenille. Le moteur idéal dépend principalement du couple souhaité (couple: "force" à l'axe moteur), la vitesse et le courant nécessaire. C'est la raison pour laquelle les moteurs ne sont pas inclus avec le châssis. Nous recommandons généralement l'usage de moteurs à engrenages métalliques Haute Puissance (HP: High Power) puisque les chenilles nécessite quand même un couple correct pour déplacer efficacement le robot; les moteurs non HP (à plus faible puissance) avec le plus grand rapport de vitesse peuvent également convenir mais ils seront également plus lent et offre moins de contrôle. Pour ce châssis, nous recommandons de préférence les moteurs HP 50:1, 75:1 ou 100:1 HP. La table ci-dessous résume les caractéristiques principales de ces trois moteurs à engrenage. Hormis les spécifications moteurs, ce résumé reprend également la vitesse maximum du Zumo avec ce moteur pour une charge de 0.5 Kg. Notez que ces informations sont reprise pour une tension de fonctionnement de 6V, ce qui est la tension approximative obtenue avec 4 piles Alcaline; 4 accumulateurs/piles NiMH AA offrent généralement une tension de 5V.
Quel micro moteur?
- Micro Moteur engrenage métal 75:1 High Power
400 rotations par minutes à vide (6v). Courant de blocage 1600mA, 0.15Nm.
Vitesse max du Zumo: 65cm/s (6v avec un charge de 500gr)
- Micro Moteur engrenage métal 50:1 High Power (Disponible sur demande)
625 rotations par minutes à vide (6v). Courant de blocage 1600mA, 0.106Nm
Vitesse max du Zumo: 100cm/s (6v avec un charge de 500gr)
- Micro Moteur engrenage métal 100:1 High Power (Disponible sur demande)
320 rotations par minutes à vide (6v). Courant de blocage 1600mA, 0.21Nm
Vitesse max du Zumo: 50cm/s (6v avec un charge de 500gr)
Electronique de commande (non incluse)
Le châssis Zumo ne contient pas d'électronique de commande, il existe cependant un Zumo Shield pour Arduino spécialement conçu pour s'interfacer avec un Arduino Uno ou Leonardo. Ce shied contient toute l'électronique nécessaire pour commander les moteurs ainsi que quelques composants complémentaires pour réaliser des robots intéressants. Parmi les composants complémentaires, il y a un buzzer pour faire du bruit, un accéléromètre 3 axes et une boussole (compass). Le Chassis Zumo + Zumo Shield Arduino + Zumo Blade + Moteurs sont également disponibles sous forme d'un produit totalement assemblé et prêt à l'emploi.
Si vous assemblez votre châssis et assemblez votre Zumo shield, vous trouverez les instructions de montages du shield dans ce document (Pololu, Anglais).
Si votre but est de créer votre propre robot autour d'un microcontrôleur autre qu'Arduino, nous vous recommandons d'utiliser le DRV8833 pilote moteur d'entraînement avec ce châssis. Vous pourriez également utiliser un breakout L298 (Pont-H) permettant de contrôler facilement des moteurs continu depuis un microcontrôleur ou un Raspberry-Pi
Piles (non incluses)
Ce châssis fonctionne avec quatre piles AA. nous recommandons l'usage de piles rechargeables NiMH AA qui produit une tension nominale de 4.8 V (1.2 V par pile). Lorsque les piles sont complètement chargées nous sommes au dessus de 5 V et lorsqu'elles sont presque à plat, elle sont bien en dessous de 5 V. Par conséquent vous devriez considérer l'usage d'un régulateur de tension step-up/step-down pour alimenter la logique de contrôle lui assurer une tension stable à 5 V même si la tension des piles est au dessus ou au dessous de 5V. Vous pouvez également utiliser des piles Alcaline qui produisent une tension nominale de 6V (et dont la tension chute en fonction de la charge).
Dimensions
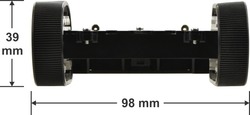
Complètement assemblé, le châssis du Zumo fait 98 mm de large, 86 mm de long et 39 mm de haut. Le Zumo est se trouve à environ à 5 mm du sol.
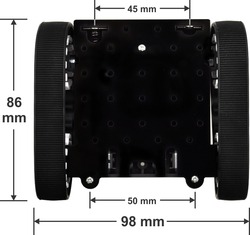
Chacun des côtés fait moins de 10 cm, ce châssis rentre remplit donc dans les exigences Mini-Sumo . Les vis à l'avant sont utilisés pour monter la plaque en acrylique sur le châssis. Vous pouvez aussi utiliser ces vis de fixation pour y placer une lame (vous disposez encore de 14 mm si vous voulez rester dans les limites imposées par le règlement Mini Sumo).
Le châssis Zumo assemblé + moteur + piles fait environs 210 gr.
Contenu
- Châssis en ABS avec logement pour 4 piles AA (+connexions)
- Plaque de montage pour projet robotique.
- 2 chenilles en silicones
- 2 roues d'entraînement (pour axe 3mm D)
- 2 roues libres avec visserie de fixation
- Visserie de fixation.
Moteurs, électronique de commande, pilotes moteurs, lame, accumulateurs/piles non inclus. Ces éléments sont utilisés à des fins d'illustration.
Tutoriel
- Les instructions de montages sont également disponibles dans le tutoriel du Robot Zumo (Wiki, Français)
- Les instructions d'assemblage sont disponibles ici (Pololu, Anglais)
Ressources
- PiBot-B: Robot mobile avec un Raspberry-Pi
Ce robot utilise un Raspberry Pi et un châssis Zumo, le tout étant contrôlé a distance par iPhone (en WiFi). La page est rédigée en allemand mais dispose d'un lien vers Google Translate facilitant les traduction. - Raspberry Zumo (Frédéric Jelmoni, Français)
Sur le site de Pololu, nous apprenons aussi que Frédéric Jelmoni à écrit un article en Français pour réaliser un Robot à partir d'un chassis Zumo - Truc et astuce: mise au point de robot Zumo
Cette article à été ecrit par le professeur Erich Styger pour son cours sur les programmation des systèmes embarqués (Université des arts et sciences appliqués de Lucerne). Il décrit différents procédés pour optimiser les performances du Zumo afin qu'il soit plus compétitif durant les compétitions de Mini Sumo. Notez que le Zumo de Mr Styger à réalisé sa propre carte Arduino; Le shield Zumo de Pololu est équipé de nombreuses capacités en parallèle avec l'alimentation, cela permet de contre-balancer le problème d'inertie des accus décrit par Mr Styger.
