






Moteur pas-à-pas - 5V, 32 pas, réduction 1/16
Petit moteur pas-à-pas unipolaire 5V - 32 pas - réduction 1/16 - 512 pas par révolution

Les paiements sont sécurisés par LyraCollect, une société de collecte de paiements française

Il est possible de se faire livrer chez soi, en point relais ou retirer sur rendez-vous chez MCHobby

Nous préparons, emballons et expédions vos commandes avec un grand respect et un grand soin.
Moteur pas-à-pas 5V à 512 pas par révolution
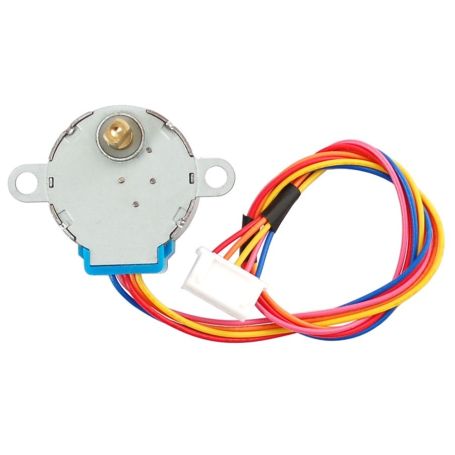
C'est un super premier moteur pas-à-pas, excellent pour de petits projets et découvertes des moteurs pas-à-pas. Ce moteur uni-polaire dispose de deux emplacements/trous de montage solidaires du moteur. Le moteur ne dispose pas seulement de 32 pas (11.25 degrés/pas) par révolution mais il intègre un engrenage réducteur ayant un 1/16 (1/16.032 pour être précis).
Cela signifie que ce moteur dispose vraiment de 32*16.032 pas par révolution = 513 pas!
L'axe est aplati, il est par conséquent facile d'y attacher du matériel à l'aide d'un peu de visserie. C'est un parfait moteur pas-à-pas pour une première expérience, la réalisation de petite plateforme robotique comme le PiZero Bot apparu dans le MagPi Magazine #40 et il fonctionne bien avec le shield moteur (motor shield) pour Arduino. ou un double pont-H ULN2803A (voir tutoriels ci-dessous).
L'engrenage réducteur implique cependant quelques effets de bord (side effect) qu'il est important de noter. Premièrement, vous pouvez tourner l'axe du moteur pas-à-pas mais il tourne moins librement qu'un moteur pas-à-pas sans réducteur (l'axe offre une légère résistance justement à cause des engrenages du réducteur). Ensuite, il est préférable de ne pas commander ce moteur en interleave ou micro-stepping sinon il mettra une éternité à faire une révolution ;-) . L'usage d'un stepping simple ou double est idéal. Le couple est assez élevé mais le moteur reste plus lent qu'un moteur sans réducteur. Le maximum est d'environ 50 RPM Rotations Par Minute en faisant fonctionner le moteur en surtension à 9 Volts, un fonctionnement à 5 volts fait chuter la vitesse de rotation sous 25 RPM.
Raccordement sur shield moteur
Vous pouvez utiliser ce moteur avec le shield shield moteur (motor shield) pour Arduino. Connectez le fil rouge (milieu) sur GND (masse), l'orange et le rose sur une sortie moteur (par exemple M1) et les fils bleu et jaune sur l'autre sortie moteur (par exemple M2).
Donc, dans l'ordre nous avons: orange - rose - rouge - bleu - jaune. Utilisez ensuite le code d'exemple proposé dans la librairie du Motor Shield d'Afafruit et initialisez le constructeur comme suit AF_Stepper motor(513, motornum) et fixez la vitesse à 5 rotations par minute en appelant motor.setSpeed(5).
Autre raccordement
Vous pouvez aussi raccorder ce moteur avec quelques transistors et utiliser la librairie stepper d'Arduino.
Détails techniques
- Moteur pas-à-pas unipolaire avec un connecteur 5 broches ayant empattement 2.54mm.
Idéal pour Arduino et breadboard :-) - 513 pas par révolution
- Réducteur à engrenage 1/16.032
- Tension suggérée: 5V DC
- Poids: 37 gr.
- Dimensions: 28mm de diamètre, 20mm d'épaisseur + 9mm d'axe ayant un diamètre de 5mm.
- Câble de 23 cm de long
- Couple à l'axe sous 5 Volts: 1.5 N*cm = 15 N*mm = 0.015 N*m (soit 0.15 Kg-cm)
- Axe: 5mm de diamètre (avec aplat)
- Impédance par bobine: approximativement 42 Ohms en DC.
Dimensions et détail du connecteur+raccordement bobines sur notre page Wiki.
Pour fixer les idées concernant le couple:
1 newton-mètre est égal à 100 N-cm, ou 10.1971621298 kg-cm (la force exercée par un poids de 10Kg au bout d'un bras de 1 cm).
Tutoriels
- Voir shield moteur (motor shield) pour Arduino
- Commande d'un moteur Pas-à-pas avec un Raspberry-Pi et un ULN2803A en Français
- Cette page d'Arduino.CC consacrée à la librairie stepper d'Arduino.
- Le numéro 40 du magazine The MagPi est entièrement consacré au Raspbery Pi Zero (The MagPi, Anglais)







