



Moteur 12V 19:1 - Axe 6mm D - 37D - engrenage metal - encodeur CPR64
Moteur 12V - 19:1 avec encodeur CPR
- Encodeur rotatif CPR
64 pas par rotation - Réducteur 19:1
- Axe 6mm D
- Engrenage métallique
- 37D x 70L

Les paiements sont sécurisés par LyraCollect, une société de collecte de paiements française

Il est possible de se faire livrer chez soi, en point relais ou retirer sur rendez-vous chez MCHobby

Nous préparons, emballons et expédions vos commandes avec un grand respect et un grand soin.
Contrôler finement la position de votre robot à l'aide d'un moteur 19:1 équipé d'un encodeur
Ce puissant moteur à réduction est identique à notre moteur 19:1 12 volts mais celui-ci est équipé d'un encodeur à quadrature qui permet de connaître la position de l'axe ou le nombre de rotation.
Cet encodeur offre une résolution de comptage de 64 changement d'état par révolution d'axe moteur, ce qui correspond a un compteur de 3200 par révolution d'axe en sortie de la boîte de réduction.
Le moteur présente un axe de 16mm de long et de 6 mm de diamètre (avec aplat, dit Axe-D).
Les spécifications principales de ce moteur sont:
- 12V
- 530 RPM et 200mA à vide
- 83.36 N-cm (8.5 Kg-cm)
- Un courant de blocage de 5.5A.
- Poids: 188gr
Bien que ce moteur est destiné à être utilisé sous 12V, ce type de moteur peut également fonctionner avec une tension inférieur ou supérieur à la tension nominale (il commence même a tourner à partir d'une tension de 1V).
Gardez bien à l'esprit que faire fonctionne le moteur sur-tension affectera de façon significatif sa durée de vie.
Bloquer ou surcharger le moteur peu diminuer sa durée de vie et même causer des dommages immédiats. Le courant de blocage peut créer des dommages thermique au moteur (le collecteur et les balais)... il ne faut pas vraiment plus d'une seconde pour créer un dommage thermique.
Vous pouvez fixer ce moteur à l'aide du support pour moteur 37D, vous pouvez également utiliser un AxeHub 6mm pour faciliter le montage d'un accouplement.
Rapport de réduction
Rapport exacte = (25 x30 x 30) / (10 x 10 x 12 ) = 18.75:1
Utiliser l'encodeur
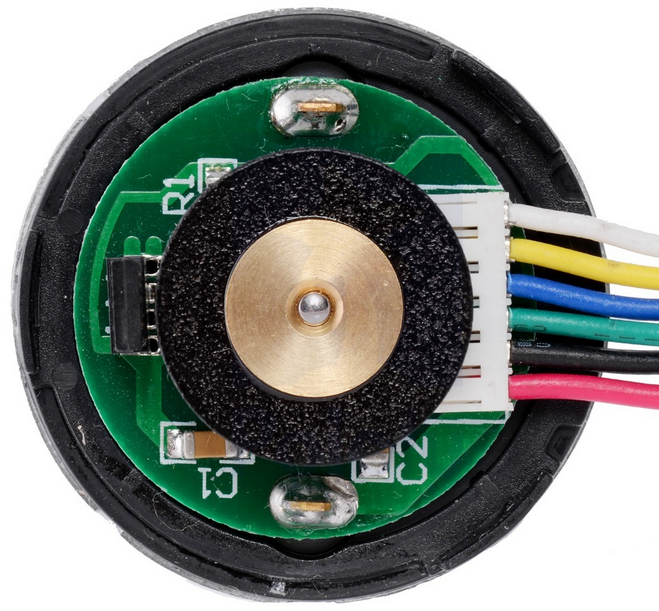
L'encodeur effet hall à deux canaux est utilisé pour détecter la rotation du disque magnétique enchâssé sur l'axe à l'arrière du moteur. L'encodeur à quadrature offre une résolution de comptage de 64 impulsion par rotation de l'axe moteur (lorsque l'on compte les flans sur les deux canal).
Comme le moteur est équipé d'une boîte à réduction de 50:1, nous avons donc 50x64 = 3200 impulsions par rotation d'axe de sortie. Whoaw! Cela permet de réaliser un positionnement vraiment précis.
Le moteur + encodeur dispose de 6 fils de raccordement (28cm, connecteur 2.54mm à 6 broches) comme le montre l'image ci-dessus.
La table ci-dessous décrit la fonction des différents fils:
| Couleur | Fonction |
| Rouge | Alimentation moteur (connecté sur une des deux broches moteurs) |
| Noir | Alimentation moteur (connecté sur l'autre broche moteur) |
| Vert | Masse/GND de l'encodeur |
| Bleu | Vcc encodeur (3.5V à 20V). ~10mA |
| Jaune | Sortie A de l'encodeur |
| Blanc | Sortie B de l'encodeur |
Le senseur à effet Hall nécessite une alimentation Vcc séparée (entre 3.5 et 20 V), sa consommation est de l'ordre de 10 mA.
Les sorties A et B présente des signaux carrés déphasés de 90°. La tension de sortie varie entre 0 et Vcc. La fréquence de transition vous informe sur la vitesse du moteur et l'ordre de transision (signal A - signal B) vous informe sur la direction.
La capture oscilloscope suivante montre le signal A (jaune) et B (bleu) produit par l'encodeur. Le moteur est alimenté en 12V et l'encodeur en 5V:

En comptant les flan montant et descendant des deux sorties A et B, il est possible d'obtenir un comptage de 64 impulsions par révolution de l'axe moteur.

Utiliser le comptage d'un seul flan (ex: flan montant) sur un seul canal réduit le comptage à 16 impulsions pour une rotation de l'axe. Par conséquent, la fréquence du signal B (bleu) 2507 Hz capturée par l'oscilloscope est 16 fois la fréquence de rotation du moteur.
2507 Hz donne 2507 / 16 = 156.68 rotations moteur par seconde, donc 156.68 / 50 = 3.13 rotations par seconde en sortie de boîte (puisque celle-ci est une 50:1).
Puissance moteur
Il est difficile de classer ces moteurs dans une des gammes LP (Base Puissance/Low Power), MP (Moyenne Puissance/Medium Power) ou HP (Haute puissance/High Power).
En fait, le courant du moteur dépend directement de la charge qu'il doit déplacer.
A vide, il consomme 300mA (donc LP). Si la charge est importante, le courant peut atteindre 5A en situation de blocage et là nous dépassons le stade HP.
La seule façon d'évaluer le courant utilisé par le moteur est de "mesurer ce courant en situation" avec un ampèremètre.
Une recommandation générale est de ne pas utiliser un moteur continu à 100% de sa capacité (courant de blocage) mais de rester en dessous de 75% de capacité.
Précaution de montage
Attention à ne pas visser les vis de fixation trop loin dans la boîte de vitesse... vous pourriez tordre les engrenages. Nous vous recommandons de ne pas utiliser une vis de plus de 3mm de long.
Contenu
Ce produit ne contient qu'un moteur avec son encodeur, la roue et le support de moteur ne sont pas inclus (juste à titre d'information.
Tutoriel
Vous saurez sans peine monter ce moteur sur votre projet. Pour le commander, vous aurez besoin d'une électronique de commande adaptée correspondant à la puissance du moteur utilisé.Voici quelques tutoriels...
- Commande d'un moteur continu avec un pont-H L298D avec Arduino
- Commande de moteurs continu avec un Pont-H L298 et Raspberry-Pi
- D'autres tutoriels de commande moteur avec Raspberry PI
Voyez aussi notre Wiki car d'autres tutoriels seront ajoutés prochainement.