








Capteur de distance sur 180 degrées - OPT3101 - Time of Flight IR
Capteur de distance et proximité
- Jusqu'à 1 mètre
- 3 canaux Time-of-Flight InfraRouge
- Ouverture: 160 degrés (presque 180°)
- 3.3V à 5V
- Interface I2C
- MicroPython ready

Les paiements sont sécurisés par LyraCollect, une société de collecte de paiements française

Il est possible de se faire livrer chez soi, en point relais ou retirer sur rendez-vous chez MCHobby

Nous préparons, emballons et expédions vos commandes avec un grand respect et un grand soin.
Réaliser des mesures de distances / proximités sur 180° via I2C avec un capteur Time-of-fly basé sur un OPT3101
*** To translate ***
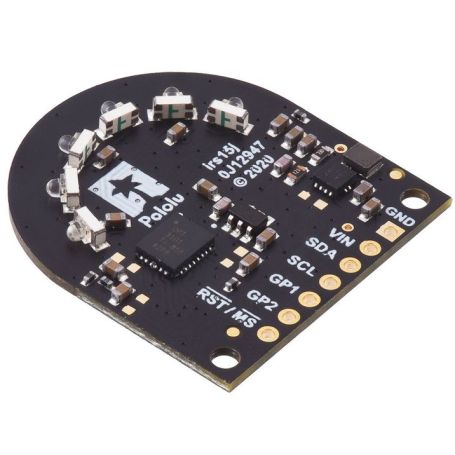
Ce capteur de proximité est une carte mettant en oeuvre 3 canaux infrarouges de type time-of-flight (mesure le temps que met la lumière à revenir) utilisés pour réaliser un capteur de proximité ou d'évaluation des distances. La carte exploite le composant OPT3101 de Texas Instrument spécialement conçu pour ce type d'application.
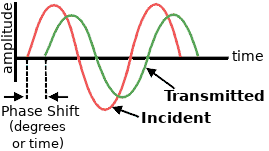
Habituellement, les capteurs infrarouges mesurent l'intensité de la lumière renvoyée pour évaluer la distance. Grâce au composant OPT3101, cette carte émet une lumière infrarouge 940nm pulsée à 10 MHz puis mesure le décalage de phase (le "délais") de la lumière renvoyée. La décalage de phase correspond à la distance de l'objet puisque, rappelons le, la lumière voyage à 300.000 Km/s.
Le capteur mesure également l'amplitude du signal renvoyé, un indicateur de la réflectance (wikipedia)/proximité de l'objet.
La carte est équipée de 3 capteurs infrarouges, 3 canaux de OPT3101, chacun couvrant environ 50° à 60°. Cette carte offre donc un très large champs de vision/détection (FoV : Field ov View) de l'ordre de 160 degrés. Dans les conditions favorables, le capteur peut mesurer un objet à une distance allant jusqu'à 1 m.
Les mesures de distance sont accessible via l'interface I2C qui est également utilisée avant pour configurer le capteur. Cette carte peut donc être utilisée avec n'importe quel microcontrôleur disposant d'un bus I2C (pilotes MicroPytion & Arduino disponibles).
Les raccordements se font par l'intermédiaire d'un connecteur 7 broches à l'arrière de la carte (idéal donc pour fixer la capteur à l'avant d'un vehicule ou d'un robot.
La carte peut être alimentée de 2.5 V à 5.5 V (qui sera aussi la tension logique). La carte dispose d'un régulateur 3.3V pour alimenter l'OPT3101. Pour finir, les signaux du bus I2C passent par un LevelShifter (adaptateur de niveau logique) pour offrir des signaux logiques au niveaux VIN (tension d'alimentation). Cette carte est donc parfaite pour fonctionner avec des microcontrôleurs en logique 3.3V et 5V.
Données de calibrations incluses
Chaque carte dispose d'une EEPROM de 256 octets contenant les données de calibration d'usine. L'OPT3101 charge automatiquement ces données au démarrage. Cette calibration définit la lecture à 100 mm pour un objet situé à 100mm du bord de la carte.
Brancher
4 connections sont nécessaire pour utiliser la carte OPT310: GND, VIN, SDA (I2C Serial DAta) et SCL (I2C Serial CLock).
La broche VIN doit être connectée à une source d'alimentation de 2.5 V à 5.5 V. Le bus I2C du capteur (SCL et SDA) doivent être connectés sur un bus I2C opérant à la même tension logique (celle fournie sur VIN).
| Pin | Description |
| GND | La connexion de masse de l'alimentation. Votre microcontrôleur doit avec une masse commune avec cette connexion GND (de façon à ce que les deux intervenants puissent identifier un 0V identique). |
| VIN | Tension d'alimentation de 2.5 V à 5.5 V. |
| SDA | Ligne de données I2C (avec level shifter, et résistance Pulled up de 10 KOhms pour ramener la ligne au niveau logique VIN). |
| SCL | Ligne d'horloge I2C (avec level shifter, et résistance Pulled up de 10 KOhms pour ramener la ligne au niveau logique VIN).. |
| GP1 | Broche d'entrée sortie 3.3V configurable (SANS level-shifter!) |
| GP2 | Broche d'entrée sortie 3.3V configurable (SANS level-shifter!) |
| /RST, /MS | Broche utilisé pour réinitialiser la carte ou pour déclencher une nouvelle mesure (SANS level-shifter ,3.3V avec résistance Pull-Up de 10 KOhms). (ces deux opérations peuvent également être commandées par l'intermédiaire du bus I2C) |
Détails techniques
- Dimensions: 27.9 mm × 30.5 mm
- Poids: 2.7 gr
- Tension d'alimentation: 2.5 V à 5.5 V
- Canaux: 3
(chaque capteur/canal dispose d'un champ de mesure FOV d'approximativement 50° – 60° pour un total combiné de presque 180°) - Courant: 130 mA
(moyenne typique en haute-luminosité avec une alimentation sous 3.3 V) - Gamme de mesure: jusqu'à 1 m (en fonction des objets)
- Schéma (pdf)
- Fiche produit du fabriquant (pour plus de détails)
Configuration
Voici les éléments de configuration principaux de l' OPT3101:
- Le canal dit "channel" avec 0=gauche, 1=avant/milieu, 2=droite
- Le luminosité de la LED IR (HDR0=faible, HDR1=forte, ou adaptatif)
- Le taux d'échantillonnage.
Ces options sont configurées via le bus I2C et peuvent être modifié entre deux échantillonnage.
La configuration du canal détermine quelle paire de LEDs infrarouge sera activée (détermine la direction de mesurée).
Le mode à faible luminosité est utilisé pour les objets proches (de l'ordre de ~20 cm). Le mode à forte luminosité est utilisé pour les mesures de distance plus longues (notz que si les objets renvoient trop de lumière ou s'ils sont trop proche alors le capteur de distance sera saturé, ce qui produira une mesure éronnée). L'OPT3101 peut être configuré dans l'un ou l'autre de ces modes mais il peut aussi être utilisé en mode adaptatif. En mode adaptatif, le capteur passe d'un mode de luminosité à l'autre en fonction de la saturation du capteur.
Les mesures de l'OPT3101 sont divisé en unités de base appelées frames ou échantillons (dit samples en anglais). Chaque frame dispose d'une configuration spécifique, mais vous pouvez modifier la configuration entre deux frames. L' OPT3101 peut être configuré pour démarrer les frames en continu, ou pour attendre un signal avant de démarrer un Frame (ce qui est appelé mode échantillonnage simple monoshot, signal envoyé via le bus I2C). Lorsque qu'un frame est complet, le résultat peu être lu depuis les registres de sortie de l'OPT3101.
Chaque frame est composé d'un nombre de sous-frames configurable occupant 0.25 ms chacun. Les résultats des sous-frames sont moyennés ensemble. Truc & Astuce: augmenter le nombre de sous-frame de mesure permet de réduire l'impact du bruit sur les mesures (mais nécessitera plus de temps de travail). Le nombre de sous-frames doit être une puissance de deux entre 1 et 4096.
Pour plus de détails concernant l'initialisation et la configuration de l'OPT3101, référez vous à la bibliothèque Arduino pour OPT3101 produite par Pololu ou la fiche technique de l'OPT3101.
Tutoriel
- Bibliothèque Arduino pour OPT3101 de Pololu, qui peut être utilisé pour interface le capteur avec une microcontrôleur compatible Arduino. La bibliothèque et exemples inclus permet de facilement configurer et mesurer des distances avec l'OPT3101.
- Bibliothèque MicroPython pour OPT3101 (produite par MCHobby), qui est un portage de la bibliothèque Arduino vers MicroPython (testée avec Raspberry-Pi Pico).