




Hat contrôle Moteur et Moteur pas-à-pas
Hat pilote de contrôle moteur continu et moteur pas-à-pas

Les paiements sont sécurisés par LyraCollect, une société de collecte de paiements française

Il est possible de se faire livrer chez soi, en point relais ou retirer sur rendez-vous chez MCHobby

Nous préparons, emballons et expédions vos commandes avec un grand respect et un grand soin.
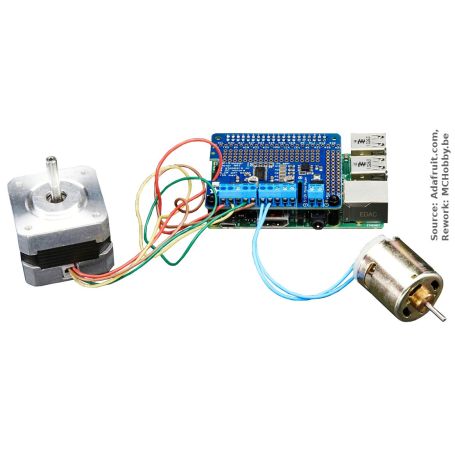
Prenez facilement le contrôle des moteurs depuis votre Raspberry-Pi avec le Hat Moteur
Que vos projets robotiques deviennent réalité avec ce nouveau HAT produit par Adafruit.
Un chouette plus pour moteur continu (DC) et moteur pas-à-pas, parfait pour n'importe quel projet animé ou mobile.
Avec cette carte, vous pouvez contrôler jusqu'à 4 moteurs continu ou deux moteurs pas-à-pas avec un contrôle de la vitesse en PWM.
Le Raspberry Pi et les moteurs ne sont pas inclus.
Etant de donné que la Raspberry-Pi n'a pas beaucoup de broches PWM, Adafruit à décidé de placer un controleur PWM sur la carte pour controler le sens et la vitesse des moteurs. Cette pucle est capable de controler tous les moteurs via I2C. Seul deux broches (SDA et SCL) sont nécessaires... même pour piloter plusieurs moteurs. Et puisque le bus I2C permet également de connecter d'autres périphériques I2C ou HAT sur les mêmes broches du bus I2C.
En fait, il est possible d'empiler plusieurs HAT moteur (théoriquement jusqu'à 32 cartes) pour contrôler jusqu'à 64 moteurs pas-à-pas ou 128 moteurs continu (ou une combinaison des deux). Pensez à acheter des stacking header 40 broches pour remplacer le connecteur fournit avec le produit.
Les moteurs sont pilotés à l'aide de MOSFET TB6612 supportant 1.2A par canal avec des pointes de courant à 3A. Cela représente une grande amélioration par rapport a un pont-H L293D et il y a également des diodes anti-retour (en roue libre).
Adafruit à également eu la bonne idée d'ajouter un FET de protection sur les broches d'alimentation (protection contre la polarisation inverse accidentelle) et puisqu'il reste un peu de place disponible celle-ci à été convertie en zone de prototypage.
Comme tous les produits AdaFruit, le HAT est livré assemblé et testé. Il vous restera à souder le connecteur 40 broches vendu avec le produit (ou un stacking header que vous pouvez acquérir ici) et les borniers. C'est une opération facile qui ne devrait pas prendre plus de 15 minutes.
Quelques spécifications clés:
- 4 pont-H: chipset TB6612 fournissant 1.2A par pont (3A en pointe) avec protection thermique (extinction), diodes anti-retour (dite "en roue libre"). Capable de faire fonctionner des moteurs continu de 4.5V à 13.5V.
- Jusqu'à 4 moteurs continu avec contrôle bi-directionnel et vitesse assignable individuellement (vitesse 8-bits, valeur de 0 à 255, soit une résolution d'environ 0.5%)
- Jusqu'à 2 moteurs pas-à-pas (unipolaire ou bipolaire) avec bobinage simple, bobinage double, en interleaved ou micro-stepping.
- Des borniers de connection pour raccorder facilement des fils de 0.8 à 0.1 mm² (18 à 26 AWG) et l'alimentation
- Bornier 2 poles protégé contre la polarisation inverse et cavalier pour connecter une alimentation externe de 5 à 12 volts continu.
- Fonctionne avec Raspberry Pi-2, B+, A+ mais peut également être utilisé avec un Raspberry-Pi A ou B (vous devez vous procurer un connecteur 2x13 poles).
- Installez la bibliothèque Python facile à utiliser, jetez un oeil sur sur les exemples et vous êtes prêt à démarrer!
HAT livré assemblé et testé, avec bornier et connecteur 2x20. Quelques opérations de soudure sont nécessaires pour placer le connecteur 2x20 inclus (ou un Stacking Header non inclus).
Le Raspberry Pi, les moteurs, pack pile ne sont pas inclus.... mais nous disposons de nombreux moteurs et moteurs pas-à-pas dans notre gamme "moteur & robotique". Voyez la section tutoriel pour plus d'information.
Détails techniques
- Dimensions: 65 x 56 x 13mm
Tutoriels
- Tutoriel HAT contrôle moteur (Wiki, Français)
Un tutoriel détaillé avec schéma, branchements, bibliothèque Python et exemples. - Tutoriel HAT contrôle moteur (AdaFruit, Anglais)
Un tutoriel détaillé avec schéma, branchements, bibliothèque Python et exemples.
- Compatibilité Raspberry
- Zero / Zero W, Pi 3A, Pi 3B+, Pi 4, Pi 400/500, Pi 5, Zero 2 W
- Interface : Connecteur
- HAT (RPi GPIO)