




Hat Moteur Pololu - Double MC33926 - Assemblé
- Pour 2 moteurs continus
- 5-28 V
- 3A continu (5A en pointe) par moteur
- Bibliothèque Python
- Assemblé

Les paiements sont sécurisés par LyraCollect, une société de collecte de paiements française

Il est possible de se faire livrer chez soi, en point relais ou retirer sur rendez-vous chez MCHobby

Nous préparons, emballons et expédions vos commandes avec un grand respect et un grand soin.
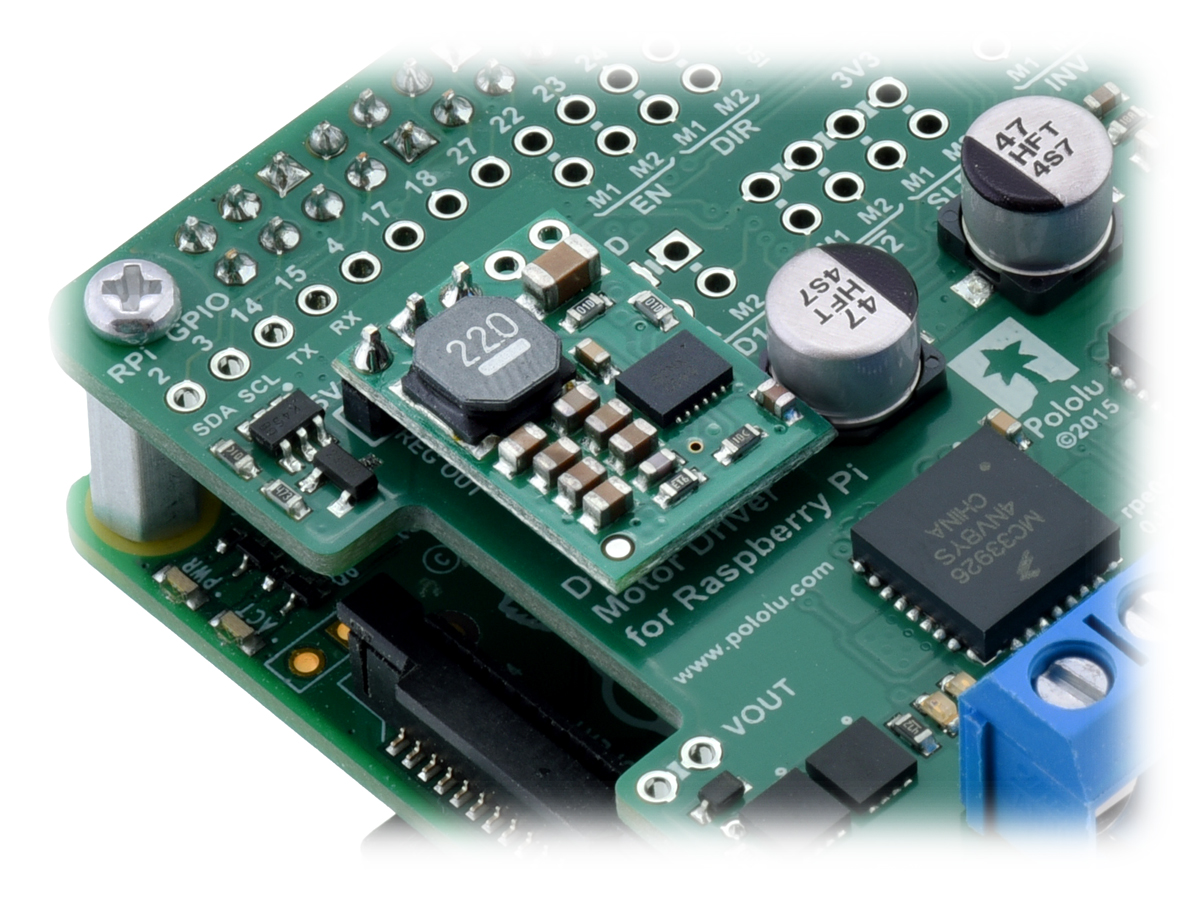
Un double contrôleur moteur MC33926 pour Raspberry Pi, 5-28 Volts, 3 Ampères
Cette carte de contrôle moteur convient à tous les Raspberry-Pi disposant d'un GPIO 40 broches. Il vous permettra de contrôler facilement, dans les deux sens de rotation, une paire de moteurs continus (moteur à collecteur). Cette carte d'extension utilise deux contrôleurs moteurs MC33926 de Freescale fonctionnant entre 5 et 28 V. Les contrôleurs moteurs peuvent délivrer un courant de 3 ampères par canal. Ce courant de 3 ampères peut être supporté en continu avec des pointes de 5 ampères pendant quelques secondes.
La carte inclus également d'autres fonctionnalités comme un circuit de protection contre la polarisation inversée et portes logiques permettant de réduire le nombre d'entrées/sorties nécessaires pour piloter les circuits intégrés des pilotes moteurs.
La carte répond aux spécifications mécaniques Raspberry Pi HAT (Hardware Attached on Top) même s'il manque l'EEPROM ID pour que la conformité soit complète.
Nous disposons également d'un breakout similaire équipé d'un double MC33926 pour Arduino et Arduino-compatibles. Si vous avez besoin d'une alternative plus compacte (en taille), basse puissance et plus économique alors vous pouvez opter pour un double contrôleur DRV8835 pour Raspberry Pi.
Fonctionnalités
- Large gamme de tension de fonctionnement: 5 V à 28 V
- Courant de sortie: 3 A en continu (pointe à 5 A) par moteur
- Fonctionnement en PWM jusqu'à 20 kHz, les moteurs contrôlés en mode dans ce mode ultrasonique sont plus silencieux.
- Les LEDs indicatrices "moteur" indiquent les quelles sont les sorties activées même s'il n'y a pas de moteurs connectés.
- La carte peut éventuellement alimenter le Raspberry-Pi par l'intermédiaire d'un régulateur (non inclus)
- Bibliothèque Python crée pour utiliser facilement et rapidement a carte.
- Il est également possible de personnaliser le mapping des GPIO (si les GPIOs utilisés par défaut ne conviennent pas).
- Le restant des broches des contrôleurs moteurs sont exposées. Cela permet une utilisation avancés du composant.
- Protection contre la polarisation inversée sur l'alimentation moteur.
- Espace de prototypage disponible
- Diagramme du double contrôleur moteur MC33926 pour Raspberry-Pi (378k pdf).
De robustes contrôleurs MC33926:
- Effet transitoires (< 500 ms) jusqu'à 40 V
- Limiteur de pointe de courant interne réduisant la puissance de sortie si le courant ou la température devient trop importante.
- Coupure en cas de sous-tension
- Sorties protégées court-circuit-à-la-masse (short-to-ground) et court-circuit-à-VCC (short-to-Vcc)
- Fiche technique du MC33296
Contenu
Pour chaque commande, vous recevrez une carte complètement assemblée avec le connecteur femelle et borniers soudés sur la carte.
Le produit inclus également 4 x entretoise M2.5 de 11mm de long, vis et écrou pour maintenir le hat sur le Raspberry-Pi.
Le Raspberry-Pi, moteurs et pack d'alimentation n'est pas inclus!
Utiliser le contrôleur moteur
Cette section explique comment utiliser le double contrôleur moteur MC33926 et fournit quelques informations concernant les broches du hat (et controleurs) pour vous aider à débuter facilement avec ce HAT. Nous recommandons chaudement la consultation de la fiche technique du MC33296 (1MB pdf) pour une description détaillée, tables de vérités et caractéristiques électriques. Cette carte d'extension est essentiellement une carte breakout pour les deux circuits intégrés MC33926 accompagnés de quelques circuits logiques simplifiant le contrôle des moteurs. La fiche technique est donc la meilleures source d'informations pour répondre aux questions qui n'auraient pas été abordées ici.
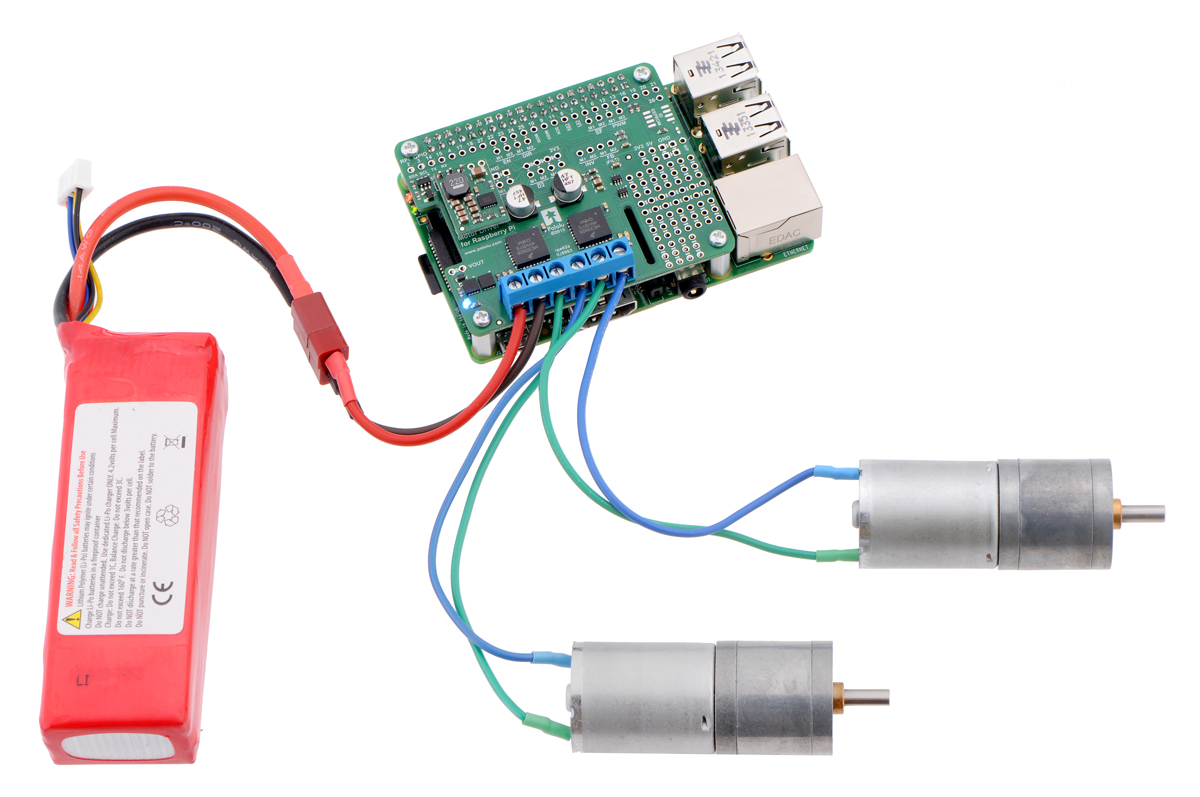
Dans son état par défaut, les sorties de puissance moteurs et l'alimentation du Pi sont totalement séparés (même s'il existe une masse commune et que l'alimentation 3.3v du Pi est utilisée pour la logique de contrôle de la carte). Lorsque la carte est utilisée de cette façon, le Raspberry-Pi doit être alimenté via son connecteur micro USB -ET- la carte de contrôle moteur doit être alimentée avec une tension de 5 V à 28 V (via les broches VIN et GND).
La carte inclus également un ensemble de trois pastilles permettant d'y connecter un régulateur de tension permettant à l'étage d'alimentation moteur de fournir une tension d'alimentation au Raspberry-Pi (voyez la section "alimentation" ci-dessous).
Un circuit de protection permet de protéger la carte contre polarisation inversée par accident lorsque l'on raccorde l'alimentation moteur. Cette alimentation moteur protégée est accessible via les deux broches libellées VOUT (sur le côté gauche de la carte).
La carte inclus des portes logiques permettant d'activer le pilotage/freinage des contrôleurs MC33926 à l'aide de seulement 2 broches par moteurs (PWM et direction). Etant donné que le fonctionnement en mode pilotage/freinage offre une meilleure relation de linéarité entre le cycle utile PWM et la vitesse moteur, que le fonctionnement en mode pilotage/roue-libre, Pololu recommande d'utiliser un fonctionnement de type pilotage/freinage lorsque cela est possible.
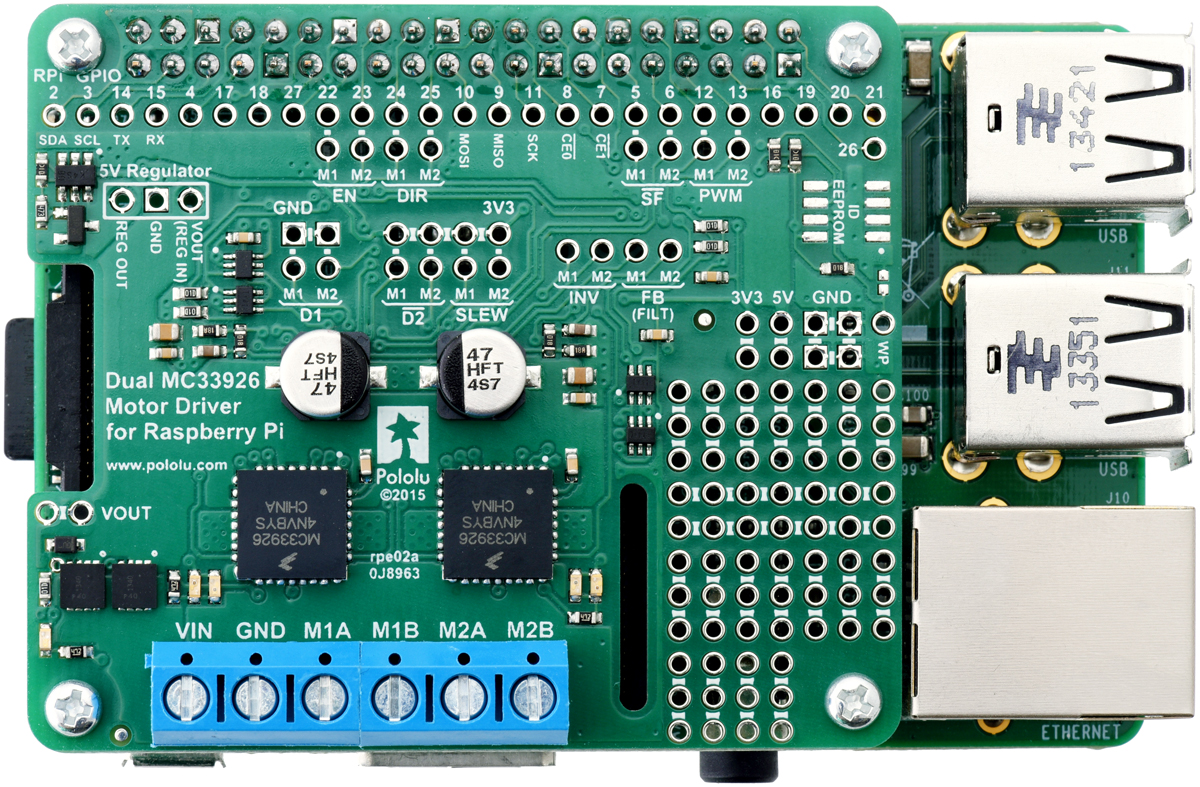
Brochage par défaut
Cette table reprend l'utilisation des GPIO du Raspberry-Pi et indique la fonctionnalité de celles-ci sur les contrôleurs moteur:
| RPi GPIO | Motor driver pin | Description |
|---|---|---|
| 5 | Moteur 1 SF | Sortie "Status flag": à raccorder sur une broche d'entrée Raspberry-Pi où la résistance pull-up est activée. Ce signal est au niveau haut lorsque la carte fonctionne normalement. Dans le cas d'un erreur du contrôleur moteur, le circuit intégré place le signal SF au niveau bas. Si l'une des broches "disable" (D1 or D2) désactive les sorties alors SF est également placé au niveau bas par le contrôleur moteur. |
| 6 | Moteur 2 SF | Voir description du GPIO 5 |
| 12 | Moteur 1 PWM | Entrée vitesse moteur: Appliquer un signal PWM (Pulse Width Modulation = modulation en largeur d'impulsion) sur cette broche produit un signal PWM identique sur les sorties moteurs du contrôleur. Lorsque cette broche est au niveau bas, les moteurs "freinent" (configuration de "freinage" d'un pont H où les sorties sont raccordées à la masse). Les moteurs sont actifs lorsque cette broche est au niveau haut. La fréquence maximum autorisée pour le signal PWM est de 20 kHz. |
| 13 | Moteur 2 PWM | Voir description du GPIO 12 |
| 22 | Moteur 1 EN | Entrée "Enable": broche permettant de commander l'activation/désactivation du pilote moteur. Cette broche est maintenue au niveau bas par une résistance pull-down, ce qui place le contrôleur moteur en mode d'économie d'énergie et désactive les sorties moteurs (plaçant les sorties en haute impédance). La broche EN doit être placé au niveau haut pour activer le contrôleur moteur. |
| 23 | Moteur 2 EN | Voir description du GPIO 22 |
| 24 | Moteur 1 DIR | Entrée "Direction moteur": Le courant circule de la sortie A vers la sortie B lorsque la broche DIR est au niveau bas. Le courant circulera de la sortie B à la sortie A lorsque la broche DIR est au niveau haut. |
| 25 | Moteur 2 DIR | Voir description du GPIO 24 |
Ré-adressage des broches
Toutes le broches du GPIO du Raspberry-pi sont reportés le long d'une rangée de connecteur (pastille). Chaque broche des contrôleurs moteur utilisée par la carte est "raccordé" sur cette rangée de connecteur. Les broches GPIO utilisés sont identifiables par un marquage sous la carte (et une double paire de trous). Si vous désirez utiliser un autre GPIO pour contrôler un des signaux du contrôleur moteurs, alors vous pouvez couper la piste entre la paire de trou (identifié par un petit trait sur l'image ci-dessus) et raccordé le trou du bas vers le nouveau GPIO.
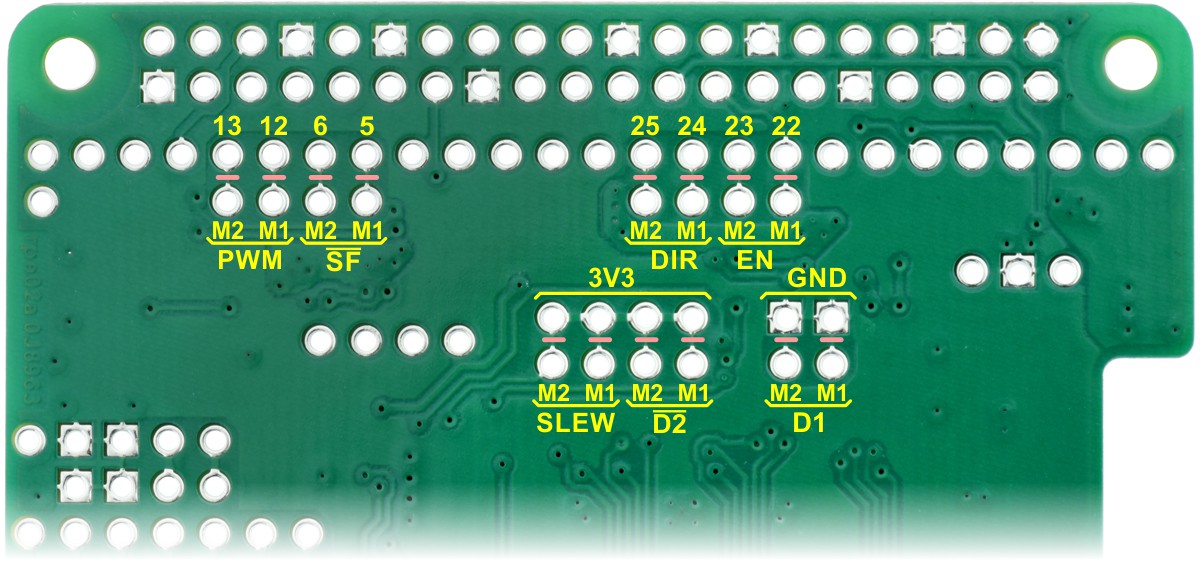
Note: le brochage par défaut de la carte à été réaliser en tenant compte des fonctionnalités des broches du GPIO du PI (ainsi que les pull-ups et pull-downs correspondant au contrôle des directions moteurs (les broches SF doivent être en pull-up, les autres en pull-down); Si vous faites un remapping des broches du contrôleur sans tenir compte de ces spécificités (pull-up/pull-down) alors vous rencontrerez des problèmes de fonctionnement et contrôle de la carte. Voyez la documentation du Raspberry Pi pour plus d'information sur l'état par défaut du GPIO.
Alimenter le Pi depuis le contrôleur moteur
Il y a un connecteur 3 broches (3 pastilles) entouré d'un rectangle portant le libellé “5V Regulator” (régulateur 5V). La broche “VOUT (REG IN)” est directement raccordé sur l'alimentation moteur de la carte (derrière l'électronique de protection contre la polarisation inverse), la broche “REG OUT” est connectée sur le rail de distribution 5V du Raspberry-Pi. Si un régulateur de tension adéquat est branché sur ces 3 broches alors il produira une tension de 5V qui alimentera le Raspberry-Pi depuis la tension d'alimentation moteur. Pololu recommande l'utilisation d'un D24V5F5 ou D24V10F5 régulateur DC-DC (step-down), capable de fonctionner avec une tension d'entrée allant jusque les 28 V maximum du contrôleur MC33926. Ces régulateurs sont respectivement capable de produire un courant de 500 mA ou 1 A pour le fonctionnnement du Raspberry Pi.
Prenez soin d'orienter le régulateur de tension correctement lorsque vous le branchez sur la carte! La broche “VOUT (REG IN)” doit être connecté sur la broche VIN du régulateur et la broche VOUT du régulateur raccordée sur la broche “REG OUT” de la carte.
Il y a quelques considérations d'ordre technique à garder en mémoire lorsque l'on alimente le Raspberry-Pi depuis l'alimentation de la carte moteur:
- L'alimentation moteur de la carte moteur doit offrir une tension qui est compatible avec le régulateur de tension ET les puces MC33926.
- Le régulateur de tension doit être capable gérer les besoins d'alimentation du Raspberry Pi. Les modèles B+ nécessite généralement quelques centaines de milliampères à 5 V, ce courant peut cependant dépasser 1 A si le Raspberry-Pi alimente des périphériques USB. Si un régulateur linéaire comme le LM7805 conviendra parfaitement, il peut également générer une chaleur excessive ou se couper si la température (ou tension) devient trop élevée. Pololu recommande l'utilisation d'un régulateur de type DC/DC (hacheur).
Le circuit "diode idéale" localisé derrière le régulateur permet l'utilisation, en toute sécurité, d'une source d'alimentation sur le connecteur Micro-B du Raspberry-Pi même sur la carte moteur est alimentée et équipée du régulateur de tension (pour le Pi).
Considérations concernant la dissipation de puissance
Chaque contrôleur moteur MC33926 est capable de supporter un courant maximum de 5A (en fonctionnement continu). Cependant, le courant max que la carte sera capable de supporter dépend surtout de votre capacité à refroidir les contrôleurs moteurs. La carte est conçue pour extraire la chaleur des puces MC33926 mais les performances peuvent être améliorée en ajoutant des dissipateurs de chaleur.
A l'opposé des autres pont-H, le MC33926 dispose d'une fonctionnalité permettant d'élégamment réduire le courant lorsque celui-ci dépasse 5 A ou si la température de la puce approche la limite supportée. Cela signifie que vous constaterez une perte de puissance sur les moteurs si vous poussez les contrôleurs près des limites d'utilisation des puces (cela évitera aussi d'être confronté à une coupure totale).
Pololu à testé la carte dans une pièce à température ambiante et sans système de refroidissement (pas d'air forcé ou refroidisseur). Ces tests ont démontrés qu'il était possible de faire passer 5A simultanément sur les deux canaux pendant 10 sec avant que la protection thermique ne réduise activement le courant. La carte peut délivrer 4 A sur les deux canaux pendant 40 s et 3 A en continu pendant plus de 10 minutes avant d'atteindre les courants limites ou état de protection thermique.
Les tests de Pololu ont été conduit à 100% de cycle utile; sachez que le contrôle des moteurs en PWM provoque un échauffement supplémentaire (proportionnel à la fréquence).
Conditions de brûlure
Ce produit peut devenir assez chaud pour provoquer des brûlures bien avant que la protection thermique ne s'active. Restez prudent lorsque vous manipulez ce produit et les autres composants qui y sont raccordés.
Tutoriels
- Voyez la fiche produit de Pololu.
- Voir la section ressource de ce produit chez Pololu.
Reprend bibliothèque Python et Java ainsi que les diagrammes et fiches techniques
- Compatibilité Raspberry
- Zero / Zero W, Pi 3A, Pi 3B+, Pi 4, Pi 400/500, Pi 5, Zero 2 W
- Interface : Connecteur
- HAT (RPi GPIO)
