










MAESTRO Mini - Controleur servo USB à 24 canaux
Contrôleur USB pour Servo Moteur
- Maestro Mini de Pololu
- 24 canaux
- 8 Kio mémoire (3000 positions servos)
- Logiciel de configuration, script autonome, USB-Série, Série TTL
- Bibliothèque Arduino & SDK

Les paiements sont sécurisés par LyraCollect, une société de collecte de paiements française

Il est possible de se faire livrer chez soi, en point relais ou retirer sur rendez-vous chez MCHobby

Nous préparons, emballons et expédions vos commandes avec un grand respect et un grand soin.
Créer un animatronique d'envergure en contrôlant jusqu'à 24 servo-moteurs avec un Maestro
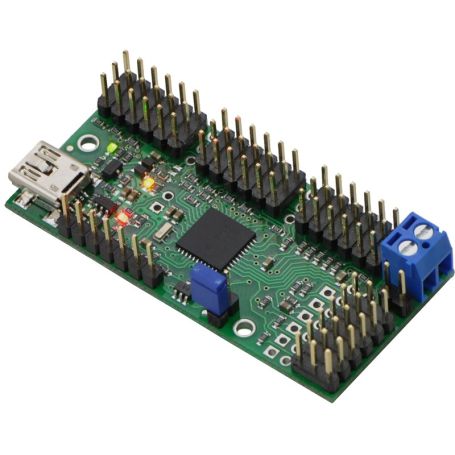
Le Maestro à 24 canaux va sacrément relevé le niveau des performances des contrôleurs servo avec des fonctionnalités tels qu'une interface USB native et un langage de scripting intégré. Cette petite carte sera être un périphérique versatile si vous avez besoin d'un contrôleur servo à haute performance (avec une résolution de 0.25μs avec un contrôle interne de la vitesse et de l'accélération) OU si vous avez besoin d'un contrôleur d'entrée/sortie à usage général (des GPIO, pour interfacer un senseur ou contrôler une vitesse/ESC via USB). Cette carte est totalement assemblée.
Note: ESC signifie Electronic Speed Controller, ESC est un matériel permettant de contrôler la vitesse d'un moteur.
Outre son côté versatile et GPIO, cette carte est compacte (30.98mm × 21.59mm).
Elle supporte 3 méthodes de contrôles différentes:
- Via une connexion USB directe vers un ordinateur,
- Via une connexion série TTL pour les système embarqués
- Via un script interne pour une application contenue dans la carte (donc sans contrôleur externe).
Les canaux peuvent être configurés comme des sorties servos pour une utilisation avec un contrôleur radio pour servo (RC pour Radio Control) ou contrôle de vitesse électronique (ESCs), comme sorties digitales, ou comme entrée analogique. Les impulsions servo haute résolution limitent le phénomène de jitter à 200 ns, ce qui fait de ces contrôleurs servos des périphériques particulièrement bien adaptés aux applications hautes performances tel que la robotique et l'animatronique. Ce maestro dispose d'un contrôle de vitesse + accélération intégré pour chaque canal... de quoi réaliser des mouvements fluides et homogènes sans avoir besoin d'un ordinateur qui calcule et envoi un flux de donnée contenant les positions et vitesses en permanence.
Le Maestro peut être montées en "série" (daisy-chaine) avec d'autres contrôleurs servo Pololu et contrôleur moteurs.
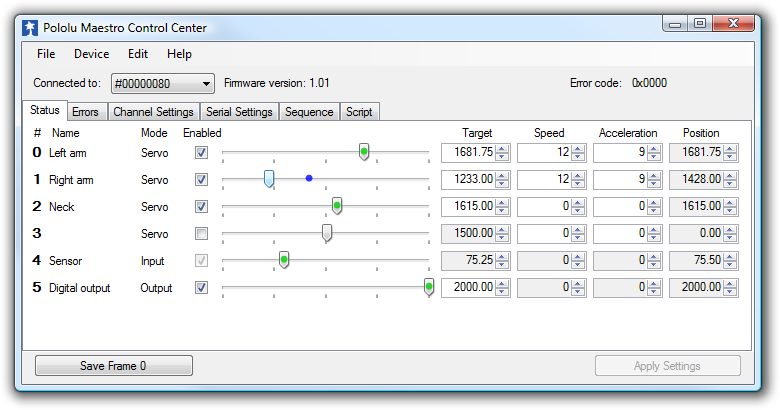
Un programme de configuration et de contrôle est disponible gratuitement pour Windows et Linux. Ce logiciel permet de configurer et tester le périphérique via une connexion USB, de créer des séquences de mouvement servo pour animatronique ou des robots marcheurs. Vous pouvez également utiliser ce logiciel pour écrire vos scripts, les tester puis les stocker dans la mémoire du contrôleur servo. Le Mini Maestro dispose de 8 Kio de mémoire interne pour les script permettant le stockage de positions des servos (jusqu'à 3000 points) qui peuvent être automatiquement "rejoué" sans ordinateur ou contrôleur connecté.
Etant donné que les canaux du Mini Maestro peuvent également être utilisé comme GPIO (entrée/sortie) ou entrée analogique. Ces canaux permettent de lire facilement des senseurs et de contrôler directement des périphériques depuis un PC (via une connexion USB). Ces canaux peuvent être utilisés avec le système de script pour activer des créations animatronique répondant à des stimuli externes et capturer des événements, la gamme Maestro va bien plus loin que juste bouger des servo.
Le Mini Maestro est totalement assemblé et dispose de connecteurs mâle avec empattement standard de 2.54mm tel que présenté sur les images produit. La gamma Maestro inclus également des version Mini Maestro 12, 18 et 24 canaux. Vous aurez besoin d'un câble USB A vers mini-B câble (non inclus) pour connecter ce produit sur une ordinateur. Les Mini et Mini Maestros sont équipés de trou de fixation de 2.18mm (pour vis en M2).
Fonctionnalités principales
- Trois méthodes de contrôle: USB, série TTL (5V) et script interne
- Sortie d'impulsion avec une résolution 0.25μs (correspond a environ 0.025° pour les servo commun, ce qui est supérieur à ce que peut résoudre un servo)
- Débit d'impulsion configurable de 1 à 333 Hz
- Large gamme d'impulsion de 64 à 4080 μs
- Contrôle de la vitesse et de l'accélération individuellement sur chaque canal.
- Les canaux peuvent optionnellement configurés pour atteindre une position spécifique ou désactivé au démarrage (ou en cas d'erreur)
- Les fonctions alternatives des canaux permettent d'utiliser ceux-ci comme:
- GPIO 5V (entrée/sortie 5 volts)
- Entrée analogique ou digitale (les canaux de 0 à 11 peuvent être utilisés en entrée analogique; les canaux 12 et plus en entrée digitale)
- Un des canaux peu être utilisé en sortie PWM avec un fréquence de 2.93 KHz à 12 MHz avec une résolution allant jusqu'à 10 bits.
- Un langage de scripting simple permettant de programmer le contrôleur Maestro afin qu'il réalise des opérations complexes (après la coupure que la connexion USB ou série).
- Un guide utilisateur (Pololu, anglais)
- Une application gratuite de configuration et contrôle pour Windows rendant très facile les opérations suivantes:
- Configurer et tester le contrôleur
- Créer, exécuter et sauver des séquences de mouvement servo pour animatronic et robot promeneur.
- Ecrire, évaluation pas-à-pas, et exécuter ("run") le script stocké dans le servo contrôleur.
- Deux façons d'écrire des logiciels pour contrôler le Maestro depuis un PC:
- Le port COM Virtuel permet d'envoyer facilement des commandes séries depuis n'importe quel environnement de développement supportant la communication série.
- Un Software Development Kit USB Pololu permet d'écrire des application USB native avancées en C#, Visual Basic .NET, et Visual C++ (le SDK contient également de nombreux exemples)
- Fonctionnalités TTL série:
- Support des débits de 300 à 200000 bauds en mode débit fixe, support des débit de 300 à 115200 bauds en mode autodetect-baud
- Support simultané des protocoles Pololu (offrant l'accès aux fonctionnalités avancées) et Scott Edwards MiniSSC II (protocole plus simple, il n'est pas nécessaire de configurer le module, la détection de protocole se fait automatiquement)
- Plusieurs modules peuvent être montés en série (daisy-chained, module Pololu servo et contrôleur moteur) en utilisant une seule ligne de transmission série.
- Peut fonctionner comme convertisseur USB-vers-Série TTL pour contrôler des projets depuis un PC
- La bibliothèque Maestro Arduino pour débuter facilement avec un microcontrôleur Arduino ou A-Star.
- La carte peut être alimenté depuis le connecteur USB ou une alimentation entre 5 et 16 V. La carte produit une tension 5V régulée (disponible pour les utilisateurs).
- Taille compacte: 2.79 × 5.84 cm et léger (environ 6 g avec connecteurs)
- Le firmware de la carte peut être mis-à-jour
Table de comparaison Maestro
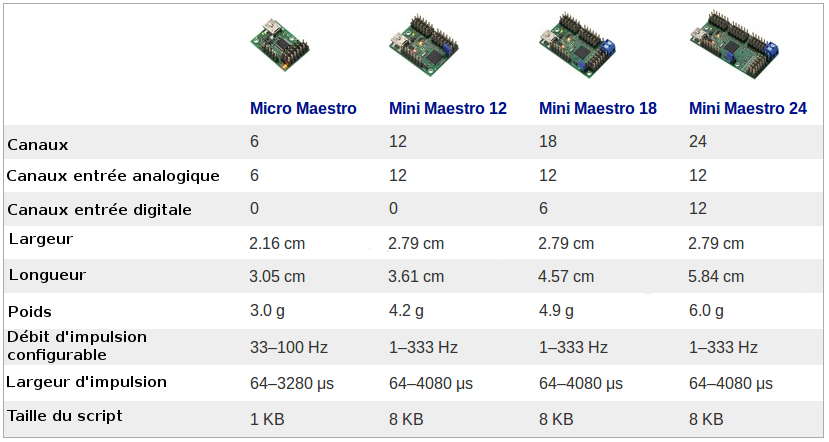
Notes:
- Le débit d'impulsion configurable et la largeur d'impulsion sont liés ensembles et dépendent de facteurs tel que le débit série et le nombre de canal utilisé. Voyez le guide de l'utilisateur Maestro (Pololu, PDF) pour plus de détails.
- Le système de script est plus puissant sur les mini Maestro que sur le Mini Maestro.
Exemple d'application
- Un contrôleur Servo série pour projets Multi-Servo (ex. un bras robotisé, animatronique) basé sur une plateforme BASIC Stamp ou Arduino.
- Contrôleur Servo PC fonctionnant via USB.
- Contrôleur Moteur PC en interfaçant avec un ESC via USB
- Un contrôleur d'affichage programmable (et autonome) répondant aux senseurs pour Halloween ou Noël. Réalisation d'un robot hexapode autonome utilisant 3 micro-servos et deux senseurs de distance digital.
- Contrôleur de servos autonome.
- Voyez cette vidéo d'exemple (Pololu sur YouTube)






