








[RETIRE] Contrôleur Moteur - TREX DMC01 de Pololu
[RETIRE]
- 2 moteurs bidirectionnels
- + 1 moteur auxiliaire unidirectionnel
- 6 - 16V
- 13A continu par moteur (30A en Pointe)
- 3 Interfaces de contrôle
- Radio Control (RC) servo pulse
- Tension analogique
- Liaison série

Les paiements sont sécurisés par LyraCollect, une société de collecte de paiements française

Il est possible de se faire livrer chez soi, en point relais ou retirer sur rendez-vous chez MCHobby

Nous préparons, emballons et expédions vos commandes avec un grand respect et un grand soin.
TReX : contrôleur DMC01 pour 2 moteurs
Le TReX associe des entrées RC, analogique et sérue avec une puissante solution de contrôle moteur capable de dériver continuellement 13 A par moteur. Le TReX fonctionnera comme un module ESC (electronic speed control) de contrôle de vitesse dès sa sortie de boîte, mais il est parfaitement possible de faire la transition entre contrôle RC/analogique et le contrôle par interface série (offrant beaucoup plus de possibilités)!
Le double contrôleur moteur TReX est un contrôleur moteur haute puissance et polyvalent permettant de concevoir un robot de petite -ou moyenne taille- autonome ou sous le contrôle humain. Le TReX peut contrôler deux moteurs bi-directionnel + un moteur unidirectionnel via trois interfaces indépendantes de contrôle moteur: impulsion servo via contrôle radio (RC), tension analogique et interface série asynchrone (RS-232 ou TTL). L'ensemble reste compacte grâce une conception faisant intervenir deux cartes empilées l'une sur l'autre. La carte carte inférieure supporte un double contrôleur VNH2SP30 pour moteur haute puissance et la carte contrôleur au dessus.
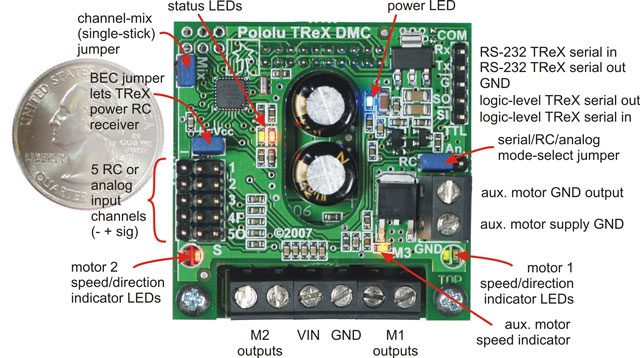
Le TReX utilise 5 canaux d'entrées pour recevoir les signaux RC ou analogiques. Les 5 canaux fonctionnent comme suit lorsque la carte opère en mode RC ou analogique:
- Canal 1: vitesse et direction moteur 1, ou gauche/droite en mode mix.
- Canal 2: vitesse et direction moteur 2, ou avant/arrière en mode mix.
- Canal 3: vitesse du moteur auxiliaire (unidirectionnel)
- Canal 4: peut être utilisé pour activer le "mode inversé", ce qui permet aux robots réversibles d'être contrôlé comme un robot normal lorsqu'il est retourné sur le sol.
- Canal 5: détermine si les moteurs sont contrôlés par les canaux d'entrées ou via l'interface série; ce canal permet de basculer le robot entre le mode autonome et mode contrôle humain.
L'interface série permet de basculer instantanément avec l'une des deux autres interfaces (RC, Analogique), permettant ainsi mélange de mode autonome et radio contrôle. Il est, par exemple, possible de configurer le robot pour fonctionner de manière autonome la plupart du temps mais un humain peut outrepasser la fonctionne autonome si le robot reste bloqué ou s'il se trouve dans une situation dangereuse.
Si le mode série est sélectionné comme interface primaire, les mesures hautes résolutions des cinq canaux d'entrées sont rendues disponibles au contrôleur autonome du robot, autorisant ainsi un mode de contrôle complexe ou un nombre illimité de possibilité d'opérateur de contrôle ou d'entrées senseur. Par exemple, le TReX pourrait être un excellent contrôleur moteur pour maintenir un robot en équilibre.
Détails techniques
- Tension d'alimentation: 6 à 16 V
- Sorties moteurs primaires: 2 sorties bidirectionnelles, Pointe à 30A, jusqu'à 13A par canal en fonctionnement continu (peut être combiné pour obtenir 25 A)
- Sortie auxiliaire: 1 sortie unidirectionnelle, 15 A en fonctionnement continu
- Contrôle de vitesse: 128 graduation dans chaque direction
- Interfaces de contrôles: Impulsion RC servo, tensions analogiques ou commandes série; Interface principale configurée avec le cavalier "mode-select"
- Canaux d'entrée: 5 (impulsion RC servo ou entrée analogique)
- Mesure d'impulsion RC: Résolution 12-bits, précision: 1 µs
- Mesure analogique: résolution 10-bits
- Interface série: RS-232 et TTL (niveau logique), bidirectionnel
- Débit: supporte les 11 débits les plus répandu de 1200 à 115,200 bps
- Contrôle étendu: autorise de multiples contrôleur servo Pololu et contrôleurs moteurs sur une ligne série
- Protocole compacte: permet l'initialisation simultanée des deux moteurs avec seulement 3 octets.
Fonctionnalités du contrôle RC/Analogique
- Cavalier BEC (Battery Elimination Circuit, optionnel) qui permet au TReX d'alimenter votre Récepteur RC ou contrôleur analogique
- Cavalier mix-mode permet la commande de moteur à un seul axe (single-stick motor) du contrôle de robot à pilotage différentiel.
- Calibration automatique pour votre contrôleur RC ou analogique (Le TReX peut étudier les valeurs maximales de chaque canal)
Options disponibles via l'interface série
- Les valeurs sur les 5 canaux d'entrée haute résolution sont disponibles
- Le remappage des valeurs des canaux d'entrée (remapped channel input values) montre ce que le TReX ferait s'il avait le contrôle.
- CRC 7bit optionel pour contrôler la validité des commandes/données
- Les données de calibrations peuvent être lue et fixées de façon explicite
- Chaque canal peut être inversé et recevoir une échelle parabolique
- Configuration du courant limite, accélération et vitesse maximum moteur
- Les moteurs bidirectionnels peuvent être individuellement configuré en mode coast (toutes les bobines sont laissées flottantes) ou en mode freinage (brake , toutes les bobines à la masse) lorsque qu'ils sont dans la zone morte (deadband)
- Mise-à-jour du firmware
Fonctionnalités de sécurité
- L'exigence "safe-start" prévient l'activation accidentelle des moteurs lors de la mise sous tension.
- Désactivation automatique des moteurs (optionnel) lors d'une erreur série, timeout ou bruit sur le canal d'entrée.
Note et support
Le TReX ne nécessite pas une interface série pour fonctionner; il fonctionnera comme un ESC (Electronic Speed Control) à son déballage. Il est cependant nécessaire d'utiliser une interface série pour bénéficier des pleines fonctionnalités du TReX.
The support for this product can be obtain on the Pololu's forums.
Tutoriels
Le support de ce produit est assuré directement par Pololu.
- Le guide utilisateur TReX (Pololu, english)
- Ressources TReX (Pololu, english)
Des tonnes d'information et logiciels de configuration. - Documentation des commandes TReX (Pololu, english)
