



Double contrôleur moteur MC33926, 3A, 5-28V
- 2 moteurs continu
- 5 à 28 Volts
- 3 Ampères en régime
- 5 Ampères en pointe
- Senseur de courant 0.525 V/A

Les paiements sont sécurisés par LyraCollect, une société de collecte de paiements française

Il est possible de se faire livrer chez soi, en point relais ou retirer sur rendez-vous chez MCHobby

Nous préparons, emballons et expédions vos commandes avec un grand respect et un grand soin.
Contrôleur 2 moteurs MC33926, 5-28 Volts, 3 Ampères
Cette carte est un controleur pour deux moteurs continu (à collecteur) basé sur le pont-h MC33926 de Freescale. Le MC33296 dispose d'une large gamme de tension de fonctionnement (entre 5et 28 V) et est capable de délivrer continuellement un courant de 3 A (5 A en pointe pendant 5 sec) sur chacun des deux canaux moteurs. Le MC33926 fonctionne avec une tension logique de 3 à 5 V, ce qui signifie qu'il fonctionnera aussi bien avec un Arduino qu'avec un Raspberry-Pi (3.3v) ou autres microcontrôleurs 3.3v. Le MC33926 supporte également le PWM ultrasonique (jusqu'à 20 kHz) et des fonctionnalités avancées comme les senseurs de courant (current feedback), protection contre les sous-tension ainsi que la surchauffe.
Sur le contrôleur deux moteurs, il y a deux pont-H MC33926, ce qui en fait une carte idéale pour piloter des moteurs de continu de moyenne puissance. Un tel contrôleur peut être utilisé pour réaliser des robots avec pilotage différentiel.
Le contrôle PWM ultrasonique (jusqu'à 20 kHz) de la tension de sortie permet d'éliminer les effets sonores que l'on entend lorsque le signal PWM est à plus basse fréquence. Le senseur de courant placé sur chaque moteur fourni une tension analogique sur les broches FB respectives. Cette tension analogique est proportionnelle au courant de sortie.
Etend donné que cette carte de contrôle moteur est basée sur sur un pont-h MC33926 de Freescale Semiconductor, nous recommandons de lire attentivement la fiche technique du MC33926 (1MB pdf).
Détails techniques
- Contrôleur Moteur: Pont-H MC33926
- Canaux: 2
- Tension minimale de fonctionnement: 5 V
- Tension maximale de fonctionnement: 28 V
Le périphérique est protégé contre les surtensions transitoires jusqu'à 40 V - Courant de sortie par canal: 2.5 continuellement
Peut être améliorer par l'utilisation de dissipateur ou flux d'air forcé. - Senseur de courant: 0.525 V/A
- Fréquence PWM maximum: 20 kHz
La broche SLEW doit être au niveau haut (HIGH) pour les fréquences au dessus de 10 kHz - Tension minimale pour la logique: 2.5 V
- Tension maximale pour la logique: 5.5 V
- Protection contre la polarisation inversée: Oui
Uniquement sur la tension moteur; l'étage logique ne dispose pas d'une protection contre la polarisation inversée. - Fiche technique du pont-H MC33296
Contenu
Pour chaque commande, vous recevrez la carte de contrôle moteur assemblée et testée. Une rangée de connecteur pour vos montages sur breadboard et des borniers de raccordement.
Brochage
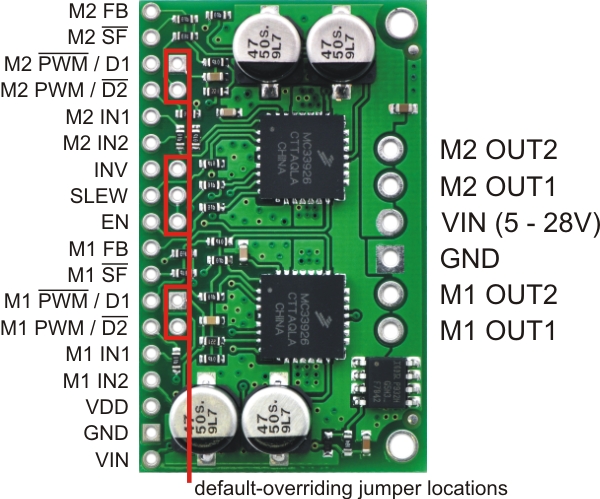
The default states of many of the MC33926 logic input pins requires that many external connections be made to use this board. To reduce the number of necessary external connections, the board has seven default-overriding jumpers. All of the default-overriding jumpers are tied to VDD, except the D1 jumpers, which are tied to GND. All VDD jumper pads are circles; the ground jumper pads are square. Note that the board has only one invert, slew, and enable pin; each of these three pins affects both motor drivers.
| Broche | Etat par défaut | Description |
|---|---|---|
| VIN | HIGH/ HAUT |
Alimentation principale des moteurs 5 – 28 V, qui devrait idéalement être réalisée sur la grande pastille VIN. Le fonctionnement de 5 à 8 V réduit le courant maximum en sortie; le périphérique est également protégé contre les effets transitoires jusqu'à 40V. La plus petite pastille VIN peut être utilisée pour distribuer VIN dnas le restant de votre circuit/montage; pour les applications à faible courant, cette broche peut être utilisé pour alimenter la carte et les moteurs. |
| GND | LOW/ BAS |
Masse commune de l'alimentation de la logique et des moteurs. |
| OUT2 | HIGH/ HAUT |
Sortie moteur contrôlée par la broche IN2. |
| OUT1 | HIGH/ HAUT |
Sortie moteur contrôlée par la broche IN1. |
| VDD | HIGH/ HAUT |
Alimentation de la logique de contrôle (entre 3 et 5 V). Cette broche est uniquement utilisée pour la pull-up SF et les cavaliers "default-overriding"; La broche VDD peut rester déconnectée dans les rares cas où aucune de ces fonctionnalités est utilisée. |
| IN2 | HIGH/ HAUT |
Signal de contrôle logique pour OUT2. Un signal PWM peut être appliqué sur cette broche (généralement fait avec les deux lignes "disable" inactives). |
| IN1 | HIGH/ HAUT |
Signal de contrôle logique pour OUT1. Un signal PWM peut être appliqué sur cette broche (généralement fait avec les deux lignes "disable" inactives). |
| PWM / D2 | LOW/ BAS |
Entrée "désactiver / disable" inversée:
Généralement, une seule des deux broches "disable" est utilisée mais par défaut les deux entrées "disable" sont active.
|
|
PWM |
HIGH/ HAUT |
Entrée "désactiver / disable". Attention, cette entrée n'est pas inversée
|
| SF | HIGH/ HAUT |
Sortie "Status Flag": Un événement de surchauffe ou courant anormalement élevé provoquera une mise à la masse (LOW) de la sortie SF. Si l'une des broches "disable" (D1 ou D2) désactive les sorties alors la sortie SF sera également au niveau bas / LOW. Dans le cas contraire, cette broches est faiblement ramenée au niveau haut. |
| FB | LOW/ BAS |
La sortie FB est la sortie analogique du senseur de courant avec approximativement 525 mV par ampère. |
| EN | LOW/ BAS |
Entrée "Enable" (activé). Les deux contrôleurs de moteurs sont en mode veille (faible consommation) lorsque cette entrée est au niveau BAS / LOW. |
| SLEW | LOW/ BAS |
Entrée sélectionnant la vitesse de transition des sorties (Slew Rate).
Cette broche devrait être au niveau HAUT / HIGH lorsqu'un signal PWM haute fréquence est utilisé sur le module (au delà de 10 kHz). Cette broche fixe la vitesse de transition pour les deux contrôleurs moteur de la carte. |
| INV | LOW/ BAS |
Une niveau logique HAUT / HIGH inverse la signification de IN1 et IN2 pour les deux moteurs. |
Connexion applicative basique
Dans une application typique, 5 lignes d'entrée/sortie sont utilisées pour connecter chaque canal moteur sur un microcontrôleur :
- Deux lignes d'entrées, IN1 et IN2, pour le contrôle de direction.
- Une ligne pour le signal "disable", D1 ou D2, pour le contrôle de vitesse en PWM
- Une ligne pour la sortie FB du senseur de courant pour surveiller la consommation de courant dans les moteurs (à connecter sur une entrée analogique ou convertisseur analogique-vers-digitale).
- Une ligne pour le signal SF (Status Flag) qui permet de surveiller les erreurs renvoyées par le contrôleur moteur (surchauffe ou courant élevé / court-circuit).
Les lignes de contrôles peuvent être réduites à deux lignes par canal moteur si le signal PWM est appliqué directement aux deux broches d'entrée et en maintenant inactive les deux broches "disable".
Pour chacun de ces cas, les autres lignes non utilisées doivent être configurées correctement pour obtenir un fonctionnement adéquat. Par exemple, si D2 est utilisé comme entrée PWM (comme c'est généralement le cas), D1 doit être maintenu au niveau bas/low pour éviter de désactiver le contrôleur moteur. Le carte offre des point de configuration pour cavalier pratique pour modifier le comportement par défaut des contrôleurs moteurs (sans qu'il soit nécessaire de souder des fils supplémentaires sur le module).
Les connexions FB (senseur de courant) et SF (status Flag) sont des connexions optionnelles même si surveiller le signal SF permet de détection des conditions de pannes et de verrouiller le système avant qu'il ne soit endommagé.
La sortie FB est une sortie à drain ouvert, vous pouvez donc les brancher en parallèle (ensemble) pour n'utiliser qu'une seule broche d'entrée sur votre microcontrôleur. Vous saurez qu'il y a un problème sans pouvoir déterminer lequel des contrôleurs (donc le moteur) est en cause.
Il est important de noter que l'état par défaut de la broche EN ("enable"=activé) est au niveau bas/low. Cela signifique que les deux moteurs sont en mode veille (économie d'énergie). Il sera nécessaire de maintenir cette broche au niveau haut / high pour permette à la carte de fonctionner. EN peut être placé au niveau haut / high soit par votre microcontrôleur, soir en utilisant les cavalier de reconfiguration (dit "default-overriding jumper") accessible à côté de la broche EN.
Protection
Le MC33926 dispose de protection sous-tension, sur-courant et surchauffe. Certains événements de protection sont mentionnés par la broche SF (status flag). Les broches SF sont au niveau bas lorsqu'elles sont activées. Vous pouvez les connecter ensembles sur une seule entrée microcontrôleur.
Si le contrôleur détecte une sur-chauffe (ou sur-courant) alors la broche SF est basculée au niveau bas / low et les sorties OUT1 et OUT2 passent en haute impédance.
Pour déverrouiller la broche SF, basculez l'état d'une des lignes D1, D2 , EN ou VIN.
La carte dispose d'un MOSFET de protection pour protéger l'étage moteur contre une polarisation inversée.
Considération concernant la dissipation de chaleur dans le monde réel
Le contrôleur moteur MC33926 utiliser sur cette carte est conçu pour supporter continuellement un courant de 5 A (valeur maximale).
Cependant, la puce surchauffera à un courant moins important. Par exemple, durant la conduite de ses propres test a température ambiante (et sans air forcé), Pololu à remarqué que le composant peut délivrer 5A pendant 5s et 4A pendant 18s avant que la protection thermique ne s'active.
Un courant de 3A est une valeur adéquate pour rester sous le seuil de surchauffe. Durant certains tests à 3 A, la protection thermique s'est activée après une minute, dans d'autres cas le contrôleur à fonctionné pendant plus de 5 minutes. Le courant maximim en régime pouvant être utilisé dans votre cas dépend de vos conditions de températures et de refroidissement. Plus vous pourrez refroidir efficacement votre contrôleur et plus élevé sera le courant max que vous pourrez utiliser en régime.
La carte est conçue pour extraire la chaleur du MC33926 mais les performances peuvent être améliorées en ajoutant un dissipateur de chaleur.
Les tests sont conduit à 100% de cycle utile mais vous devez savoir que l'utilisation d'un signal PWM cause une augmentation de chaleur proportionnelle à la fréquence.
Ce produit peut devenir rapidement chaud, assez pour causer des brûlures, bien avant que la protection thermique ne s'active. Soyez prudent lorsque vous manipulez ce produit et autres composants qui y sont connectés.
Contrairement aux autres pont-H, le MC33926 dispose d'une fonctionnalité réduisant le courant lorsque celui-ci excède 5 Amp ou lorsque la température approche de la surchauffe. Cela signifie que vous constaterez une réduction de puissance moteur lorsque vous pousserez le composant près de ses limites. Cela peut éventuellement permettre d'éviter la coupure totale.
